Method and system for generating two-dimensional map with obstacle three-dimensional information and terminal
A two-dimensional map and three-dimensional information technology, which is applied in radio wave measurement systems, electromagnetic wave re-radiation, instruments, etc., can solve the problem of reduced efficiency of dynamic obstacle avoidance, inability to obtain obstacle boundary information and spatial information, and obstacle avoidance accuracy. Low-level problems to achieve the effect of improving dynamic obstacle avoidance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
specific Embodiment
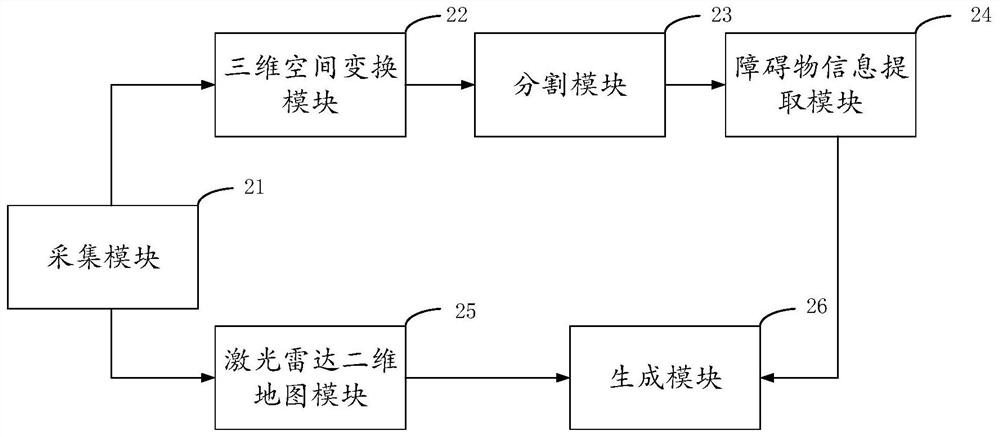
[0055] Such as figure 2 Shown is a schematic structural diagram of a two-dimensional map generation system with three-dimensional information of obstacles in an embodiment of the present invention.
[0056] Acquisition module 21, is used for obtaining point cloud data, lidar data and relative positioning sensor data;
[0057] The three-dimensional space transformation module 22, connected to the acquisition module 21, is used to perform three-dimensional space transformation on the point cloud data according to the position information and angle information installed by the depth camera, and the position information of the current frame of the robot to obtain the coordinates in the world. The point cloud data under the system;
[0058] The segmentation module 23 is connected to the three-dimensional space transformation module 22, and is used to preprocess the point cloud data in the world coordinate system using the PCL point cloud library, and perform segmentation to extra...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More