Hand exoskeletons, medical devices and simulated grasping systems
An exoskeleton and hand technology, applied in the field of robotics, can solve problems such as poor human-computer interaction performance, and achieve the effect of improving human-computer interaction performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0064] Unless otherwise defined, all technical terms used in the embodiments of the present application have the same meanings as commonly understood by those skilled in the art.
[0065] In this embodiment of the application, the "front" and "rear" referred to are based on the front and rear shown in the drawings; "first end" and "second end" are opposite ends.
[0066] In order to make the purpose, technical solution and advantages of the present application clearer, the implementation manners of the present application will be further described in detail below in conjunction with the accompanying drawings.
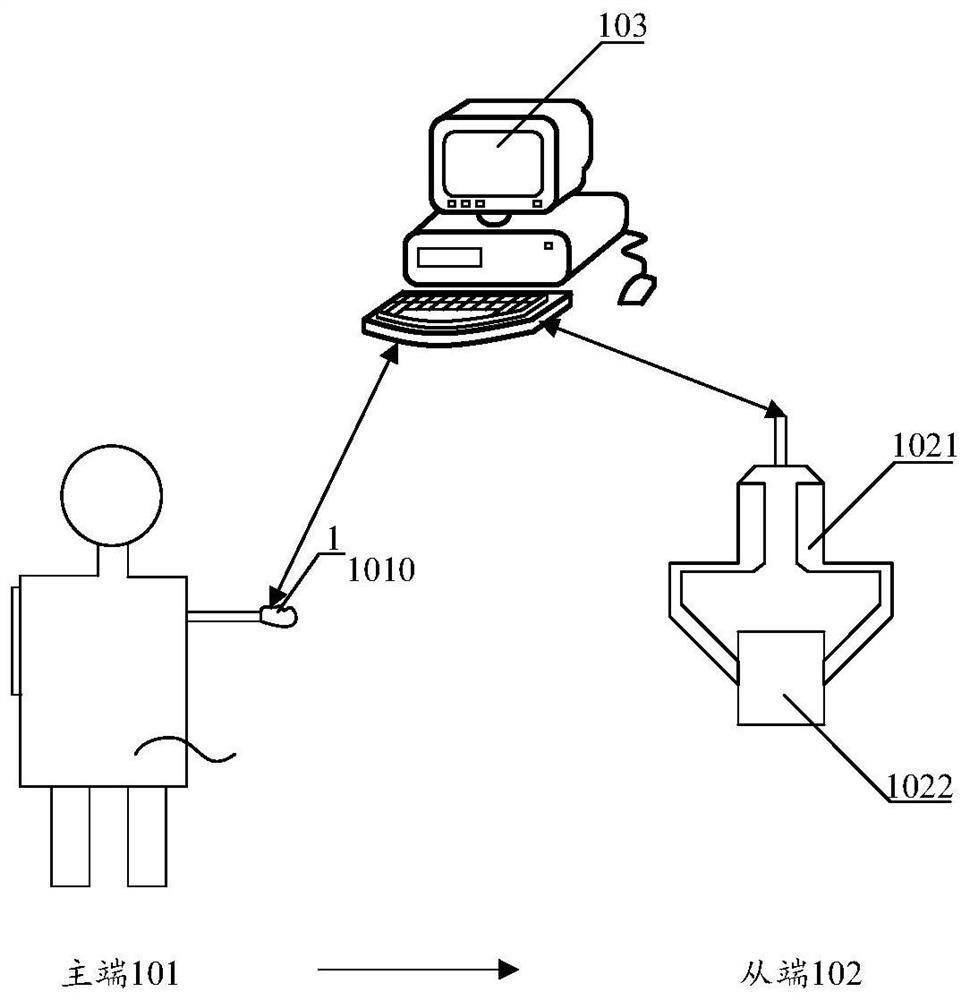
[0067] figure 1 A schematic diagram of an application scene of a hand exoskeleton 1 provided by an exemplary embodiment of the present application is shown. Please refer to figure 1 , the application scenario includes a master end 101, a slave end 102, and a computer device 103 for implementing data interaction between the master end 101 and the slave end 102. In t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More