

Driver steering intention prediction method based on hybrid learning
A blended learning, steering intent technology, applied in the field of driver steering intent prediction based on blended learning, can solve problems such as lack of connection
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0060] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
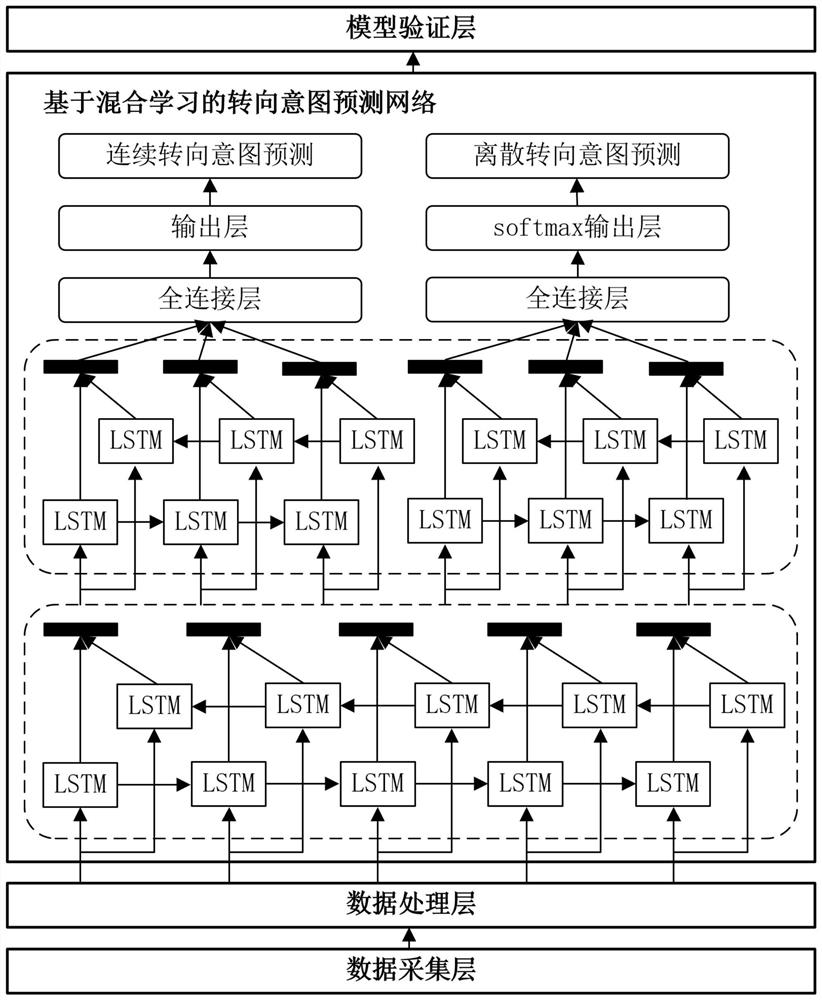
[0061] Such as figure 1 As shown, the present invention provides a method for predicting driver's steering intention based on hybrid learning, which includes the following steps:
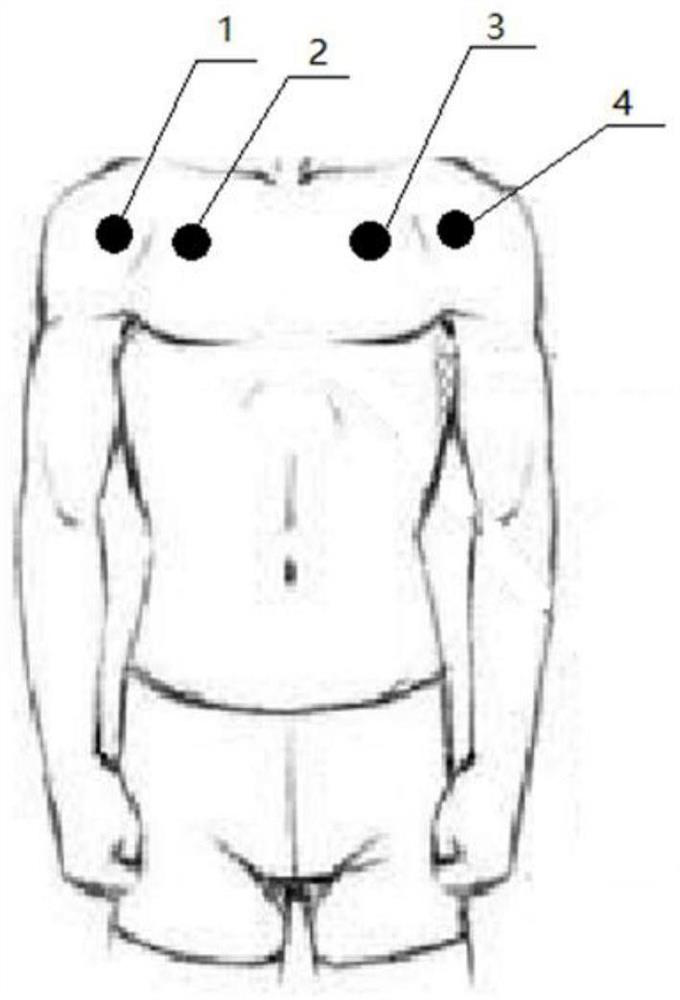
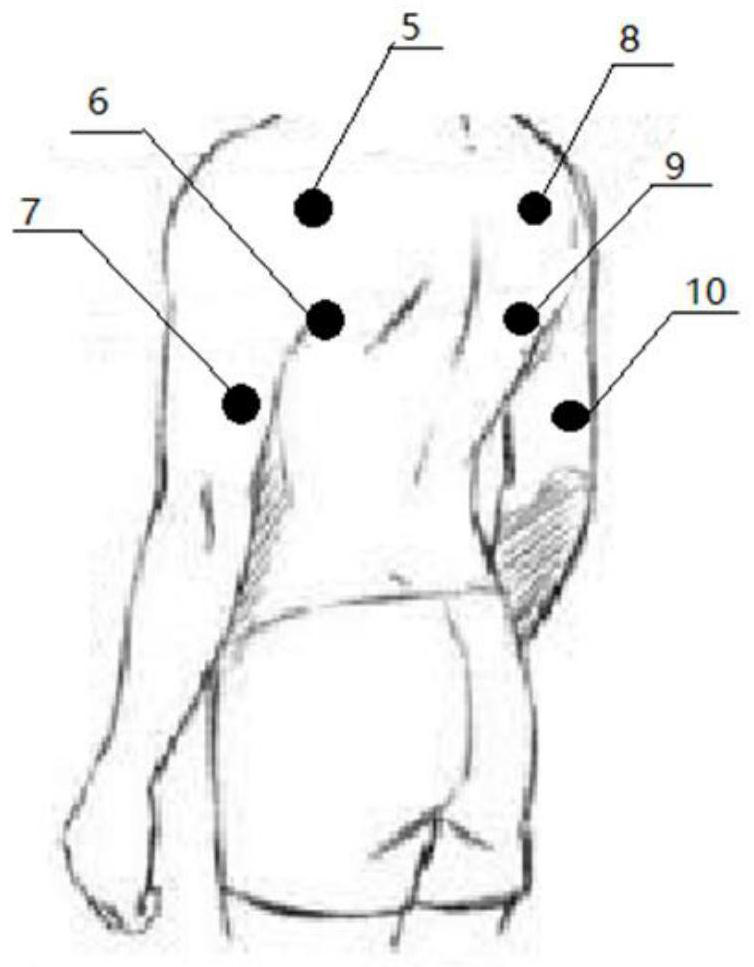
[0062] 1) Data collection: collect multi-mode data on the driving simulation platform, and preprocess the collected data;
[0063] 2) Model construction: Establish a hybrid learning time series model based on the preprocessed multi-mode data;
[0064] 3) Steering intention prediction: load the hybrid learning time series model on the intelligent vehicle, and input the driver's EMG signal sequence collected online into the hybrid learning time series model for prediction, and obtain the driver's continuous steering intention prediction and discrete steering intention forecast result.
[0065] In the above-mentioned step 1), the multi-mode data collection is carried out on...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More