

A Calibration Method of Line Laser and Manipulator
A calibration method and robotic arm technology, applied in the direction of using optical devices, instruments, measuring devices, etc., can solve the problems of unfavorable rapid calibration and strict use conditions, and achieve the effect of reliable calibration results, high degree of automation, and easy search.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
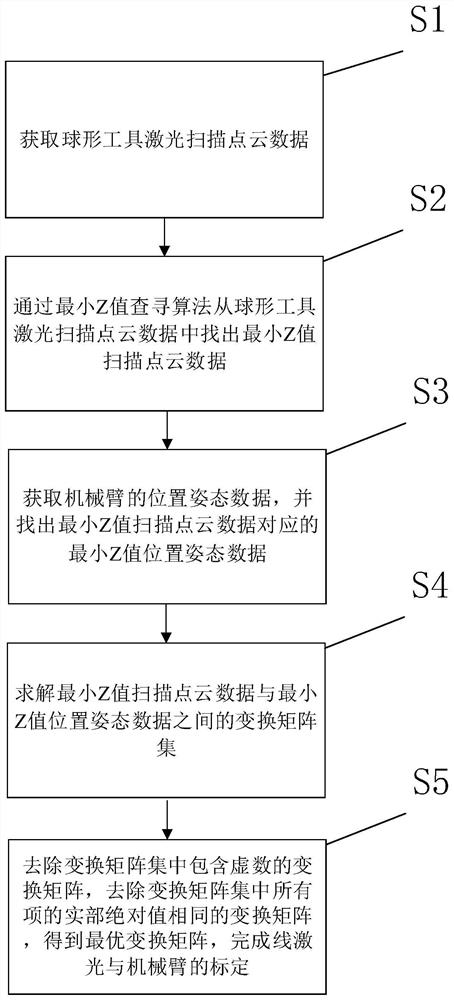
[0038] This embodiment provides a method for quickly calibrating a line laser and a robotic arm based on a spherical tool, such as figure 1 As shown, the method includes the following steps:
[0039] Step S1: obtaining point cloud data of spherical tool laser scanning;
[0040] Step S2: find out the minimum Z value scanning point cloud data from the spherical tool laser scanning point cloud data through the minimum Z value search algorithm;
[0041] Step S3: obtaining the position and attitude data of the robotic arm, and finding out the minimum Z-value position and attitude data corresponding to the minimum Z-value scanning point cloud data;
[0042] Step S4: Solve the transformation matrix set between the scan point cloud data with the minimum Z value and the position and attitude data with the minimum Z value
[0043] Step S5: Remove the set of transformation matrices transformation matrix containing imaginary numbers, remove the set of transformation matrices The t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More