

Humanoid robot falling prediction method
A humanoid robot and prediction method technology, applied in the field of humanoid robot fall prediction, can solve the problems of easy prediction error, sensor data distortion and error not having good robustness, high error rate, etc., to ensure accuracy, method Universal and easy-to-use effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
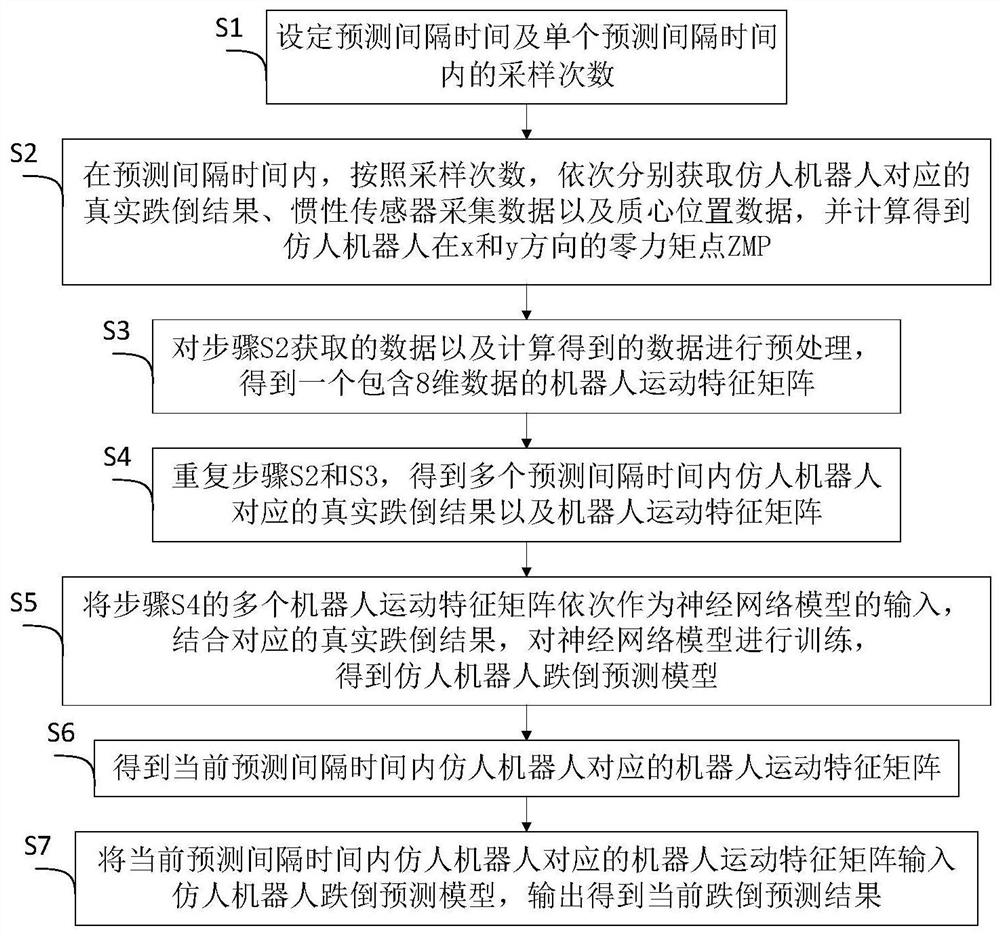
[0057] Such as figure 1 As shown, a humanoid robot fall prediction method includes the following steps:
[0058] S1. Set the prediction interval time and the number of sampling times in a single prediction interval time;
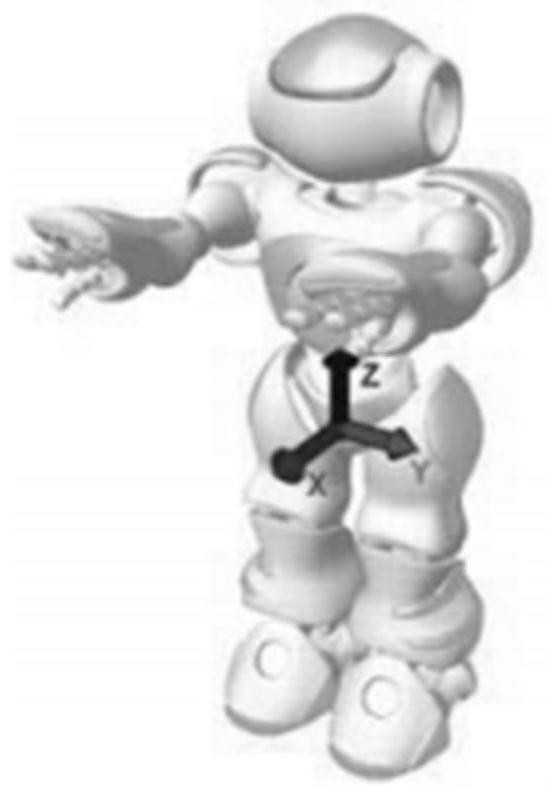
[0059] S2. In the prediction interval time, according to the number of samples, the real fall results corresponding to the humanoid robot, the data collected by the inertial sensor and the position data of the center of mass are obtained in sequence, and the zero moment point ZMP of the humanoid robot in the x and y directions is calculated;
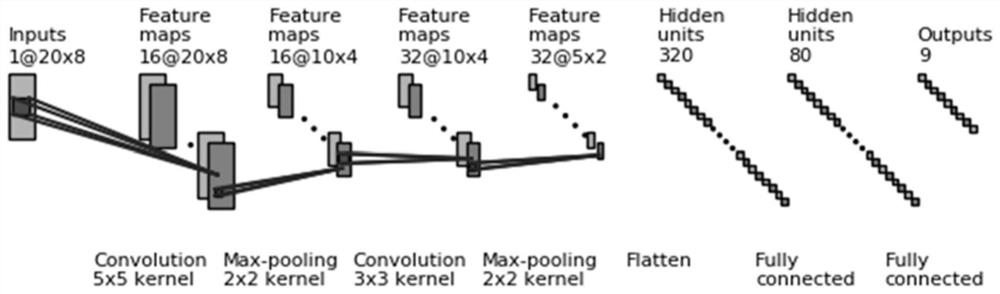
[0060] S3. Preprocessing the data obtained in step S2 and the calculated data to obtain a robot motion feature matrix containing 8-dimensional data;
[0061] S4. Steps S2 and S3 are repeated to obtain the real fall results corresponding to the humanoid robot and the robot motion feature matrix within multiple prediction intervals;
[0062] S5. Using the multiple robot motion feature matrices in step S4 as the input o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More