

Unmanned aerial vehicle autonomous flight system for multi-source positioning data
A source positioning and unmanned aerial vehicle technology, applied in satellite radio beacon positioning system, radio wave measurement system, measuring device, etc., can solve the problems of simple structure, difficulty in ensuring positioning accuracy, single function, etc., to achieve accurate positioning, Monitor Effects Comprehensive Effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
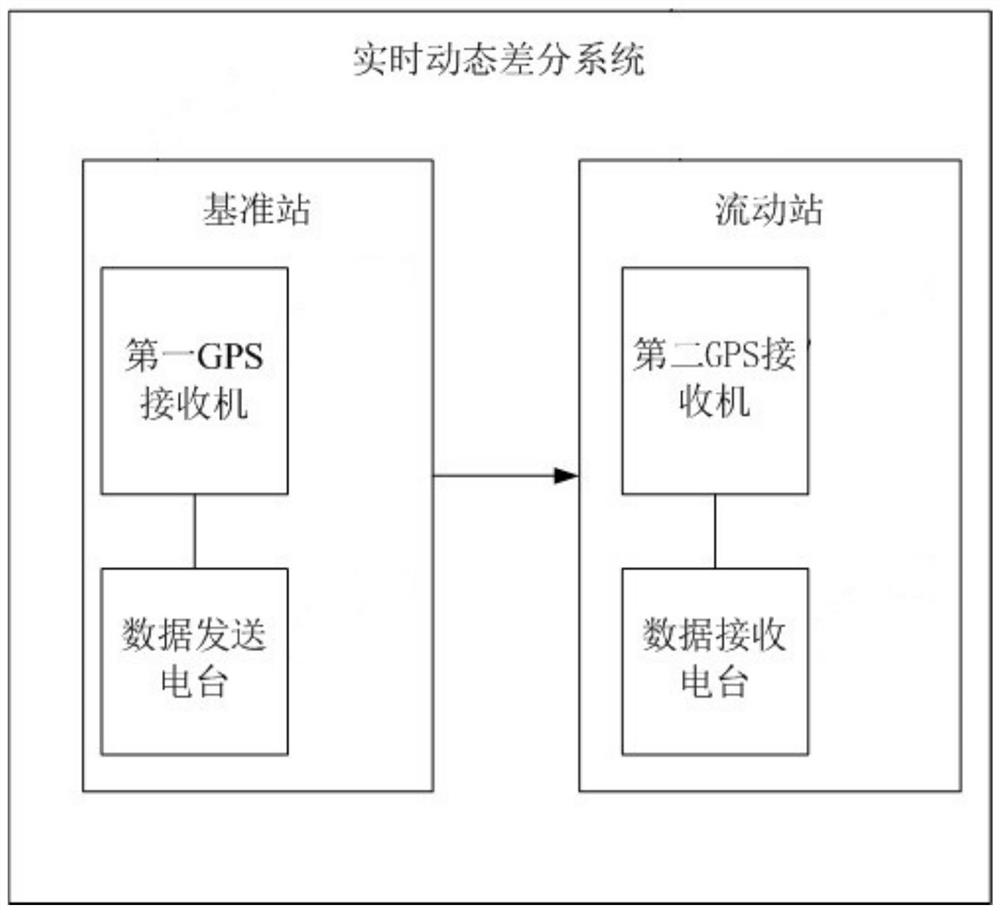
[0025] like Figure 1-2 As shown, the UAV autonomous flight system with multi-source positioning data of the present invention can be applied to an application platform such as UAV.
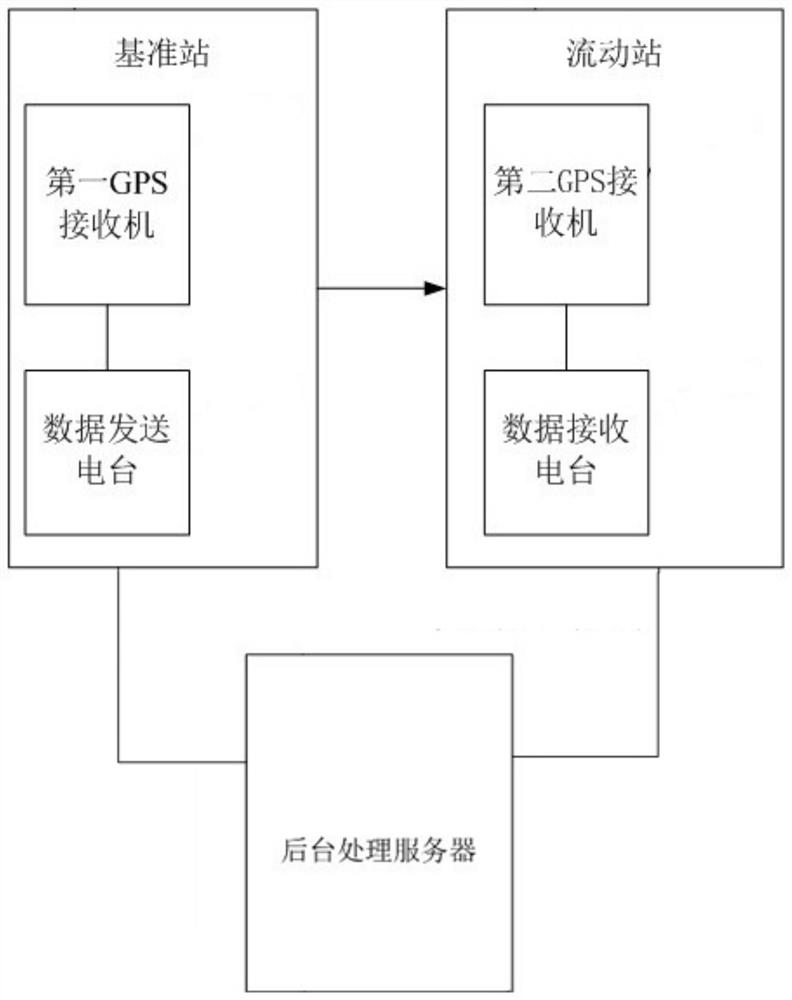
[0026] The UAV autonomous flight system of multi-source positioning data of the present invention includes a real-time dynamic differential system; the real-time dynamic differential system includes a reference station and a mobile station; the reference station establishes a communication connection with the mobile station;
[0027] The reference station includes the first GPS receiver, data sending station and power supply; the power supply is used to supply power to the first GPS receiver and data sending station; the reference station is used to obtain observation data, station coordinates, satellite tracking status information and current GPS receiver working status information, and use the data link to send to the mobile station;
[0028] The mobile station is used to receive data from the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More