

Large-scale scene free bending pipeline detection and point cloud completion method based on four-dimensional space-time perception
A technology of curved pipelines and large scenes, applied in the fields of industrial vision and 3D vision, to achieve the effect of wide applicability, high efficiency applicability, avoiding target scale changes and imaging projection deformation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only part of the embodiments of the present invention, not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
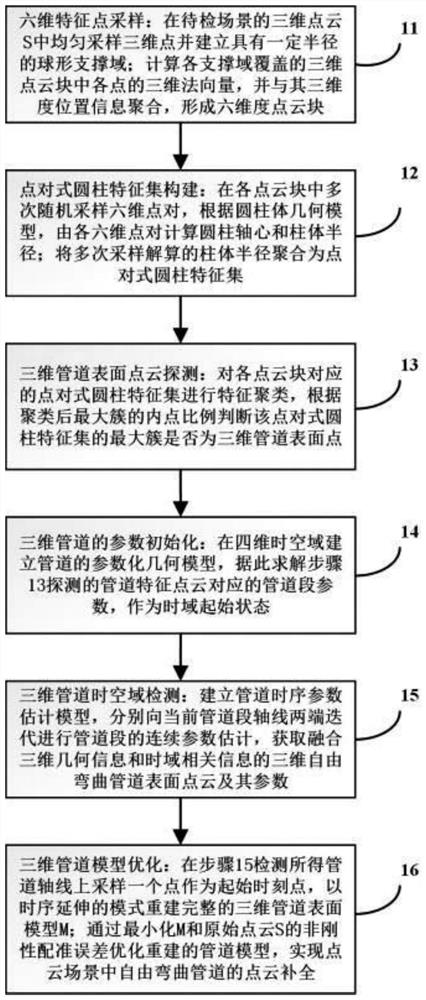
[0040] The overall realization flowchart of a specific embodiment of the present invention, as figure 1 Specifically, the following steps are included:
[0041] Step 11: Evenly sample 3D points in the 3D point cloud of the scene to be inspected, set up a spherical support domain with a certain radius with each sampling point as the center, and extract the 3D point cloud blocks covered by each support domain; calculate each point cloud block in the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More