

Tight coupling task allocation method based on improved ant colony algorithm
A technology of task allocation and ant colony algorithm, applied in the direction of calculation, calculation model, instrument, etc., can solve the problems of reasonable model difficulty, the initial solution of ants is not superior, and the convergence speed is slow.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
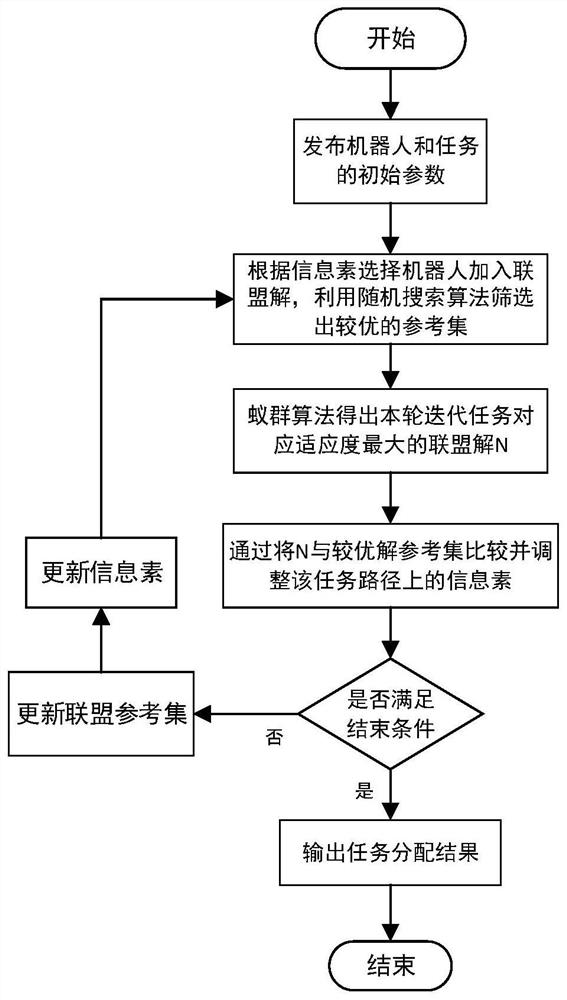
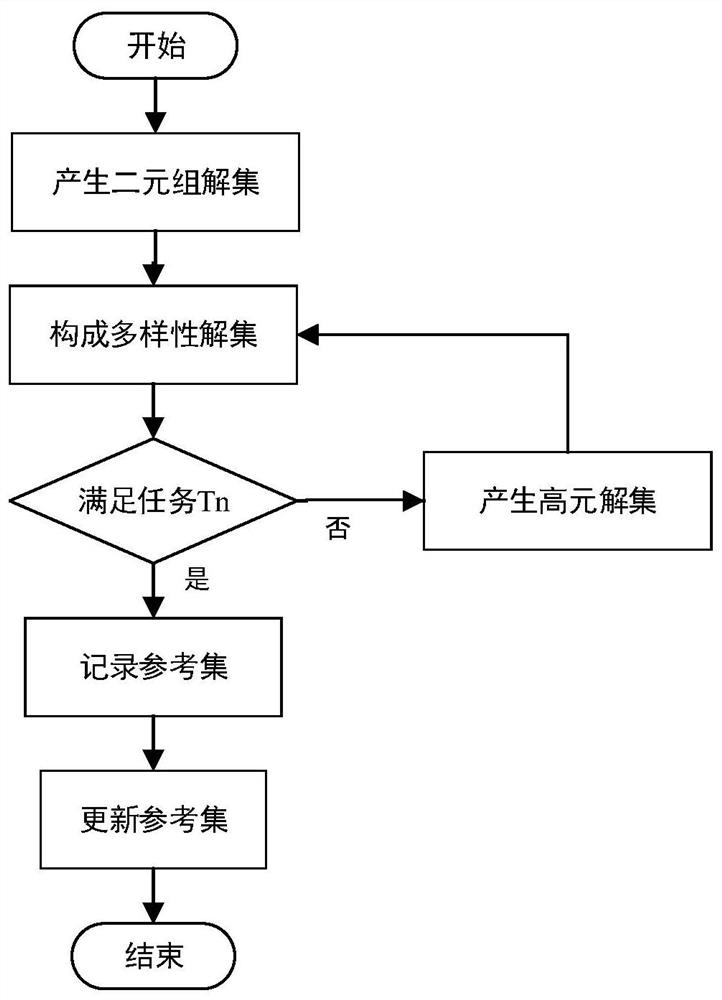
[0072] Tightly coupled tasks refer to tasks that require the cooperation of multiple robots. There is no timing and binding relationship between tasks, and collaboration requires robot alliances. At present, in the assignment of tightly coupled tasks, the most important thing is to select a suitable robot alliance to generate an alliance solution by means of permutation and combination plus algorithm screening, and to find the optimal solution through a certain strategy. The generation of the alliance solution mainly considers two factors: the first is whether the robot alliance can successfully perform the task and match the task.
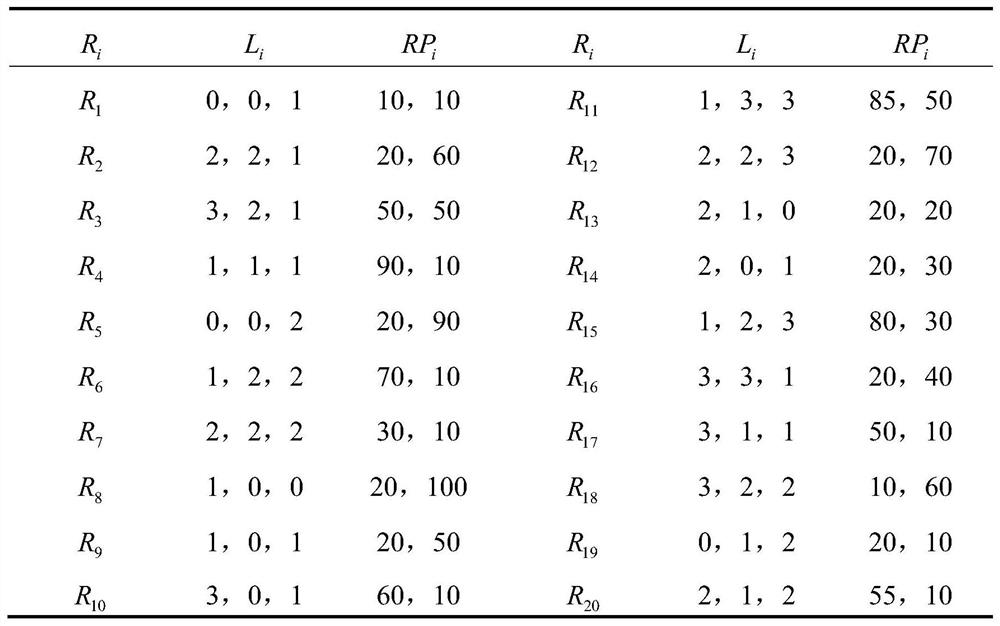
[0073] In the actual study of a multi-robot system, each robot is heterogeneous, so the corresponding capabilities of each robot are different, so the robot capabilities must be expressed mathematically. In the environment, the types of robot abilities must be limited, and these existing abilities are called basic abilities, and the agent's abilit...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More