

3D target detection and tracking method based on camera and laser radar
A target detection algorithm and lidar technology, applied in computer components, instruments, scene recognition, etc., can solve the problem that the perception system cannot meet the needs of automatic driving, and achieve the goal of overcoming the difficulty of classifying objects, good accuracy, and high reliability Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0066] see Figure 1 to Figure 9 Shown:
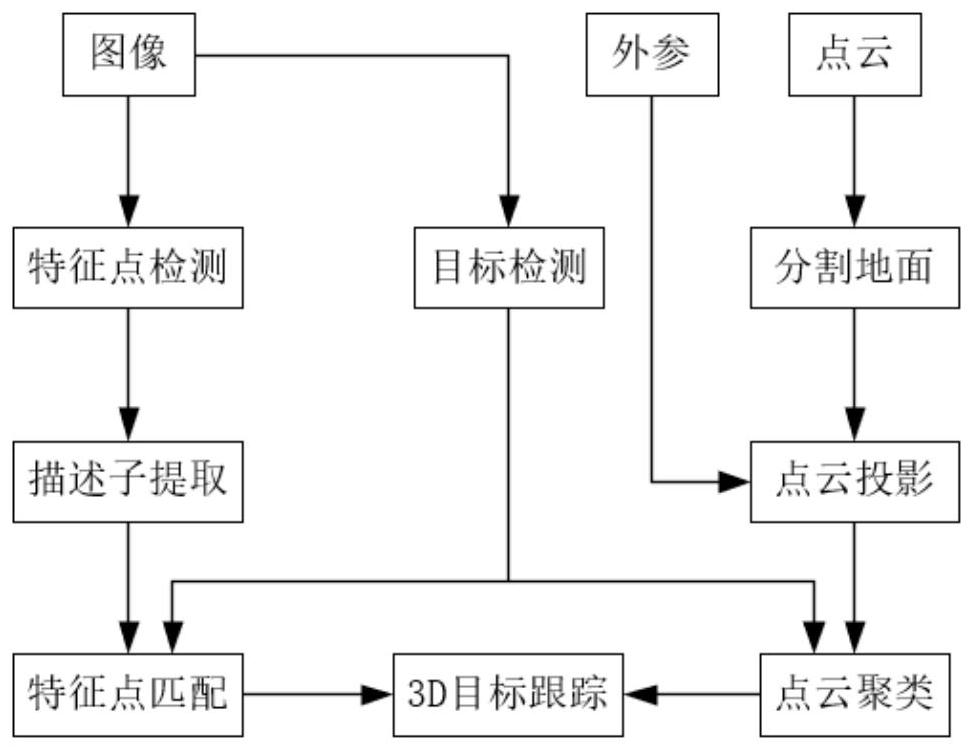
[0067] The 3D target detection and tracking method based on camera and laser radar provided by the present invention, its method is as follows:
[0068] Step 1. Calibrate the internal parameters of the camera and the external parameters between the lidar and the camera, and collect image data and point cloud data through the camera and lidar respectively;
[0069] Step 2, using the target detection algorithm to perform target detection on the image, extracting the 2D detection frame and assigning a number;
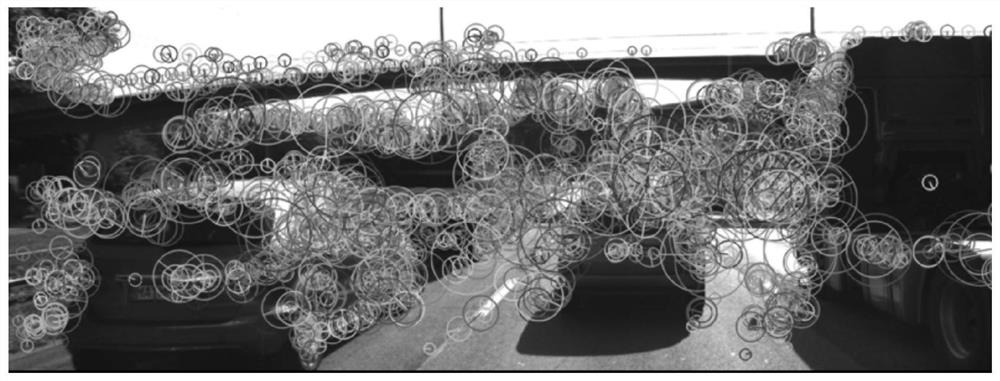
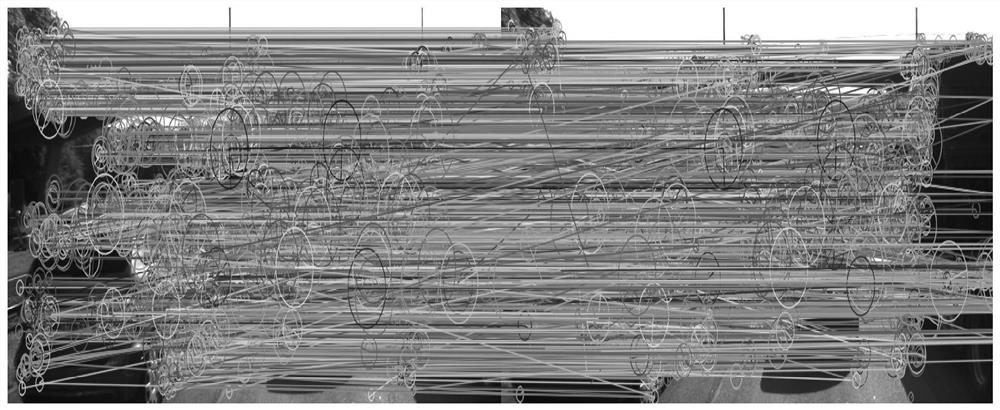
[0070] Step 3, perform feature point detection on the image, descriptor extraction, and feature point matching between the two frames of images before and after;
[0071] Step 4, perform plane fitting on the point cloud data after data preprocessing, and remove the ground point cloud;
[0072] Step 5. Project the non-ground point cloud onto the corresponding detection image according to the external parameters of the lidar and t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More