

Stair and ground sweeping and mopping robot
A robot and ground technology, applied to machine parts, manual sweeping machines, carpet cleaning, etc., can solve problems such as insufficient cleaning, a large amount of manpower and time costs, and affect the quality and efficiency of cleaning and mopping, so as to increase the contact area and The effect of pressure and stair climbing stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] The preferred embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings, so that the advantages and features of the present invention can be more easily understood by those skilled in the art, so as to define the protection scope of the present invention more clearly.
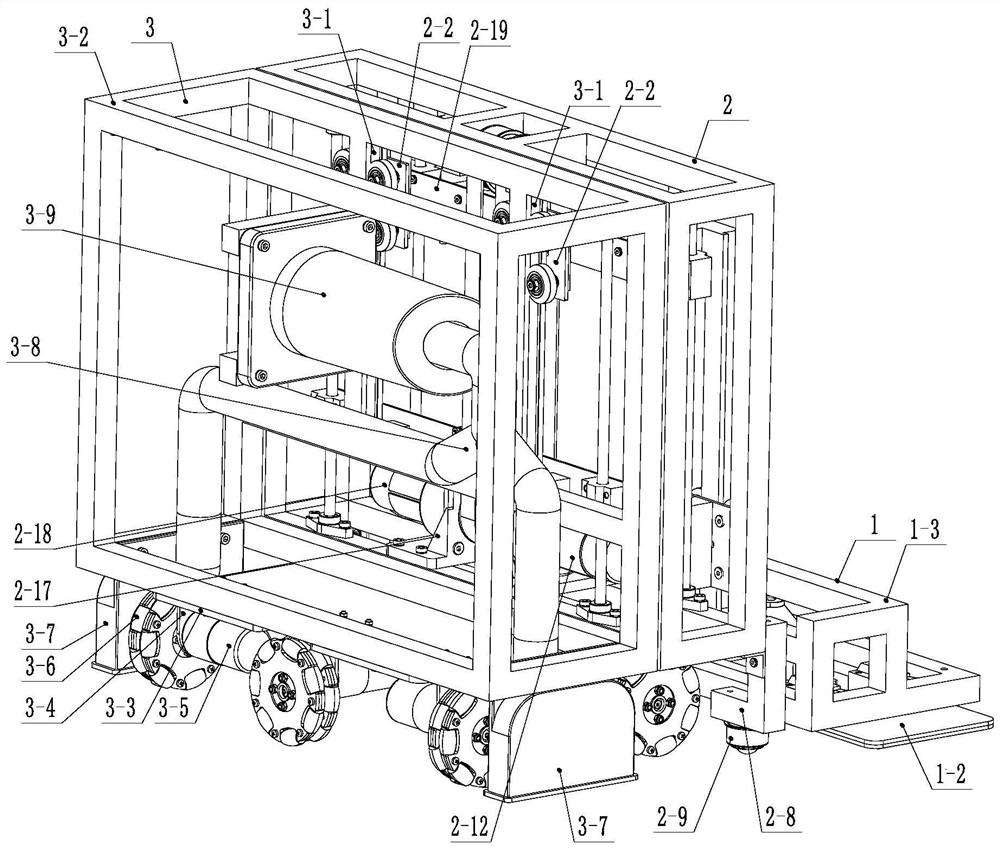
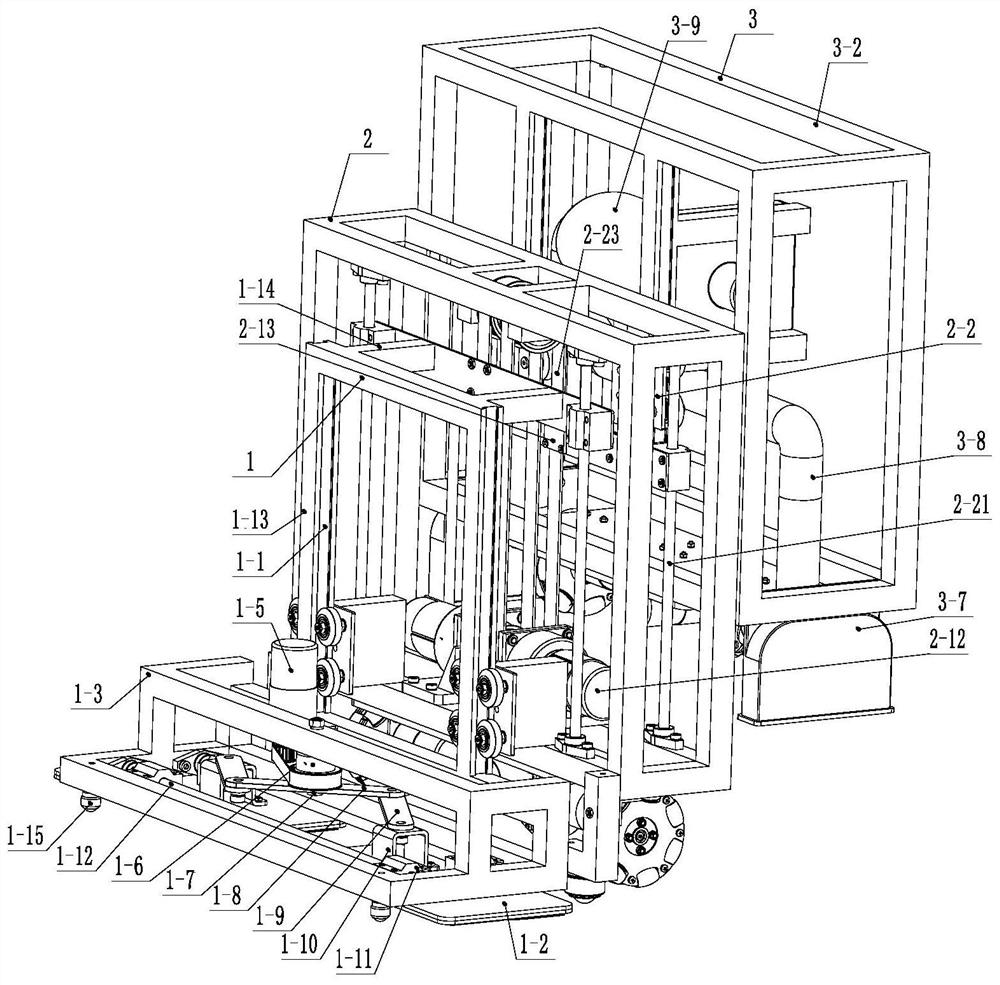
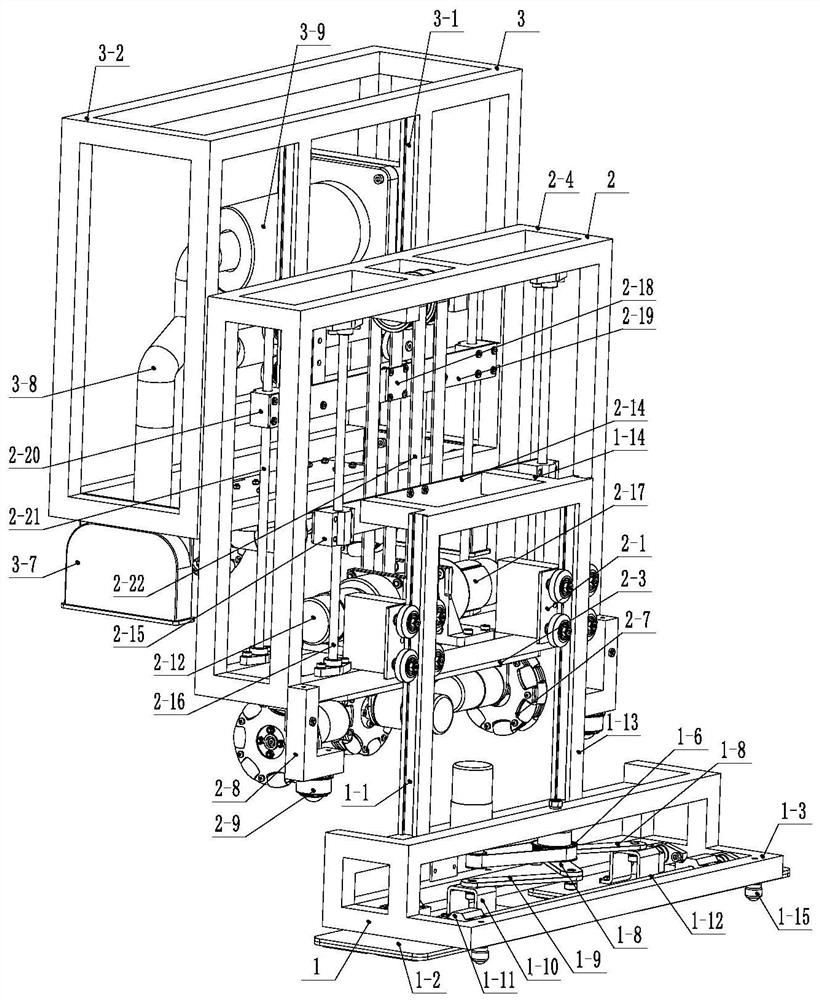
[0050] Such as Figure 1-10 As shown, the stairs and ground sweeping and mopping robot in this embodiment include a mopping mechanism 1, a transmission control mechanism 2, and a dust-absorbing and cleaning mechanism 3. The mopping mechanism 1 is used for mopping the stairs and the ground, and the transmission control mechanism 2 is used to control the lifting of the floor mopping mechanism 1 and the vacuum cleaning mechanism 3, and the climbing staircase 3 is used for vacuuming the stairs and the ground. The front side of the mopping mechanism 1 is provided with a vertical chute-1-1, and the transmission control mechanism 2. The lower part of th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More