

Flexible mechanical arm motion obstacle avoidance method based on complex space obstacle positioning
A flexible robotic arm and obstacle technology, applied in complex mathematical operations, machine learning, and details involving 3D image data, etc., can solve problems such as low obstacle positioning accuracy, large errors, and increased risk of collision, and achieve guidance efficiency. High performance, accurate path planning, and wide application range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. All other embodiments obtained by persons of ordinary skill in the art based on the embodiments of the present invention belong to the protection scope of the present invention.
[0042] According to an embodiment of the present invention, an obstacle avoidance method for a flexible manipulator based on the positioning of obstacles in a complex space is provided.
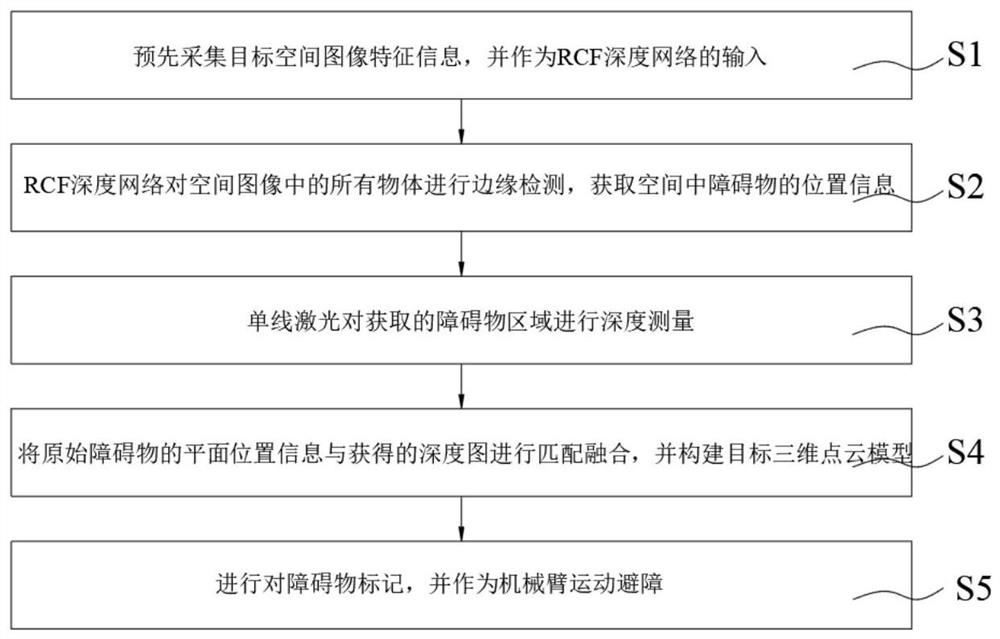
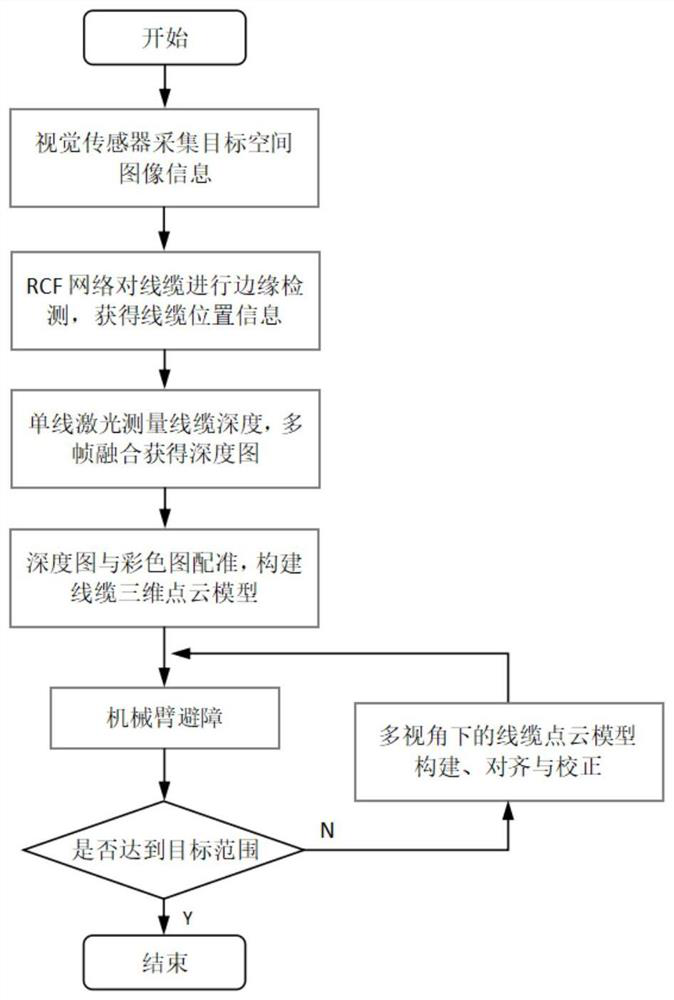
[0043] Such as Figure 1-Figure 2 As shown, according to the embodiment of the present invention, the obstacle avoidance method based on the positioning of the flexible manipulator in complex space comprises the following steps:
[0044] Step S1, pre-collecting the feature information of the target space im...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More