

A wearable passive ankle exoskeleton with controllable auxiliary force and its control method
An ankle joint and auxiliary force technology, which is applied in the direction of program-controlled manipulators, manufacturing tools, manipulators, etc., can solve the problems of inability to meet the needs of individual differences, the inability to control the spring spring force, and the inability to further optimize the power-assist effect, etc., to achieve a simple structure , light weight, and controllable boost curve
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
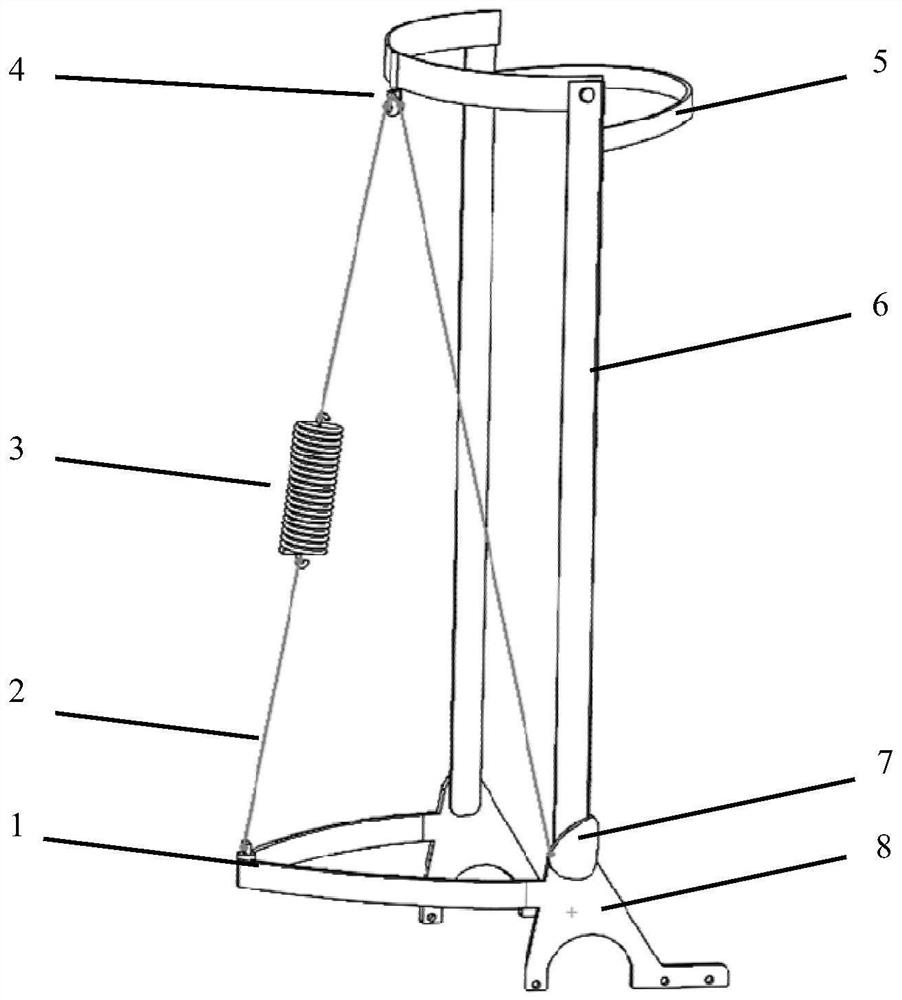
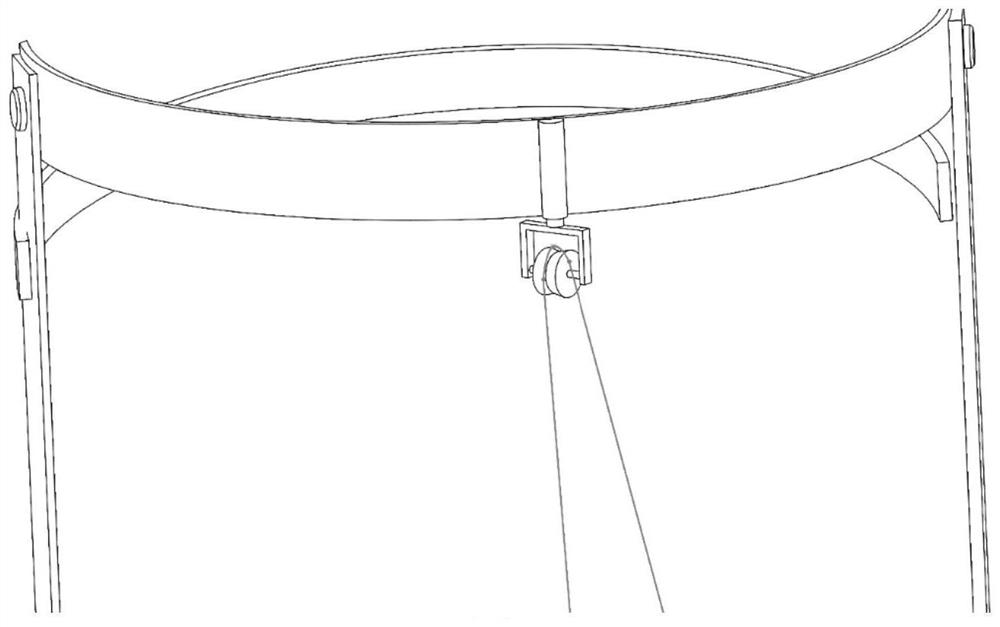
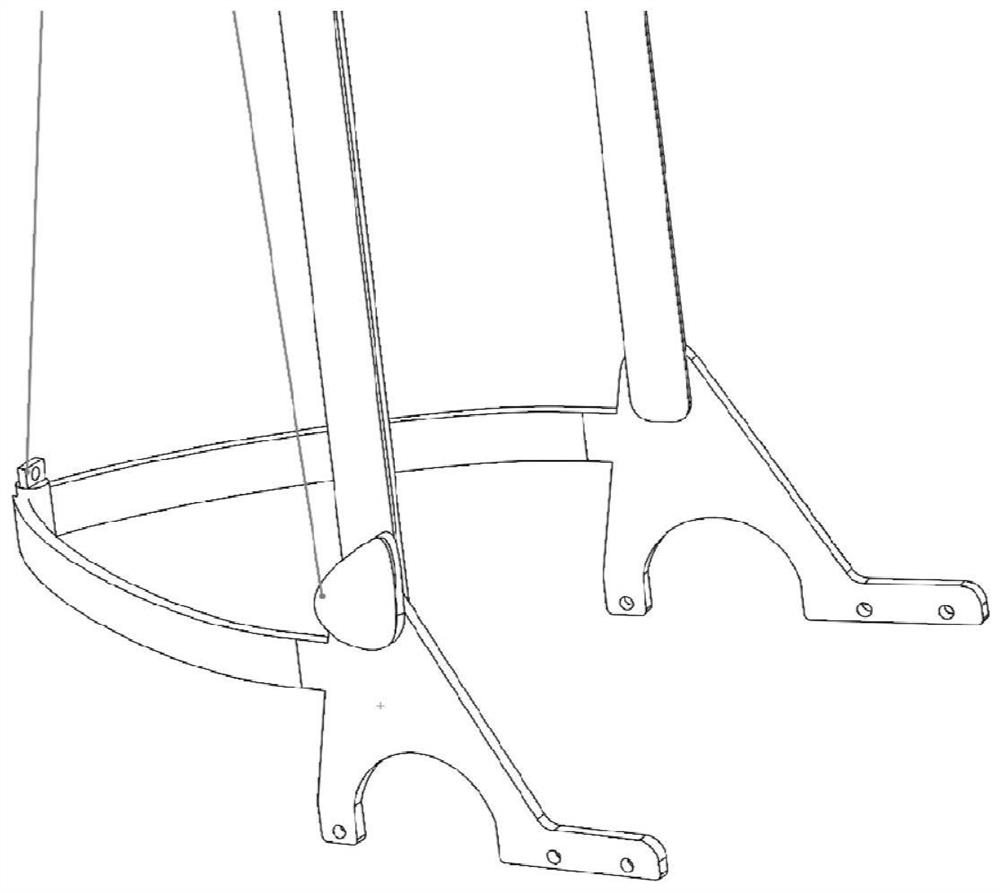
[0033] The present invention provides a wearable passive ankle joint exoskeleton with controllable auxiliary force, comprising: springs, rollers, first support brackets, second support brackets, ropes, straps, cams, first spring brackets, second springs a bracket, a first fixing bracket and a second fixing bracket;
[0034] The first spring bracket is arc-shaped, and the two ends are respectively connected to the first fixed bracket and the second fixed bracket; when the first fixed bracket and the second fixed bracket stand on the ground, the arc-shaped plane of the first spring bracket parallel ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More