

Mobile robot and walking mechanism thereof
A mobile robot and walking mechanism technology, applied in the field of mobile robots, can solve problems such as robot toppling over, driving wheels easy to hang, slipping, etc., and achieve the effect of avoiding dumping accidents
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
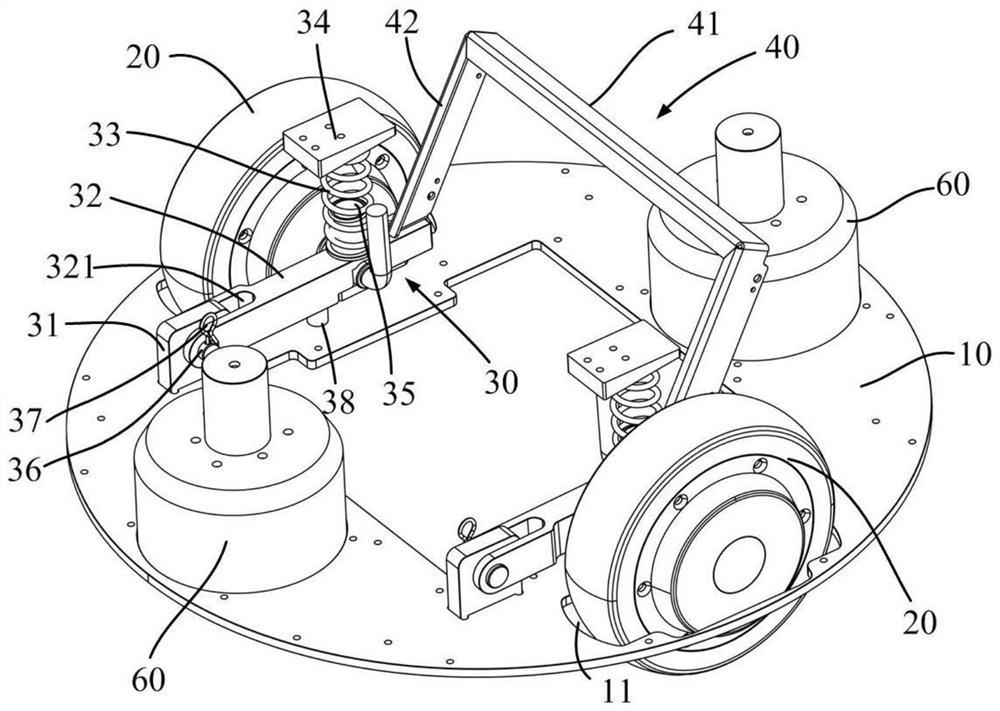
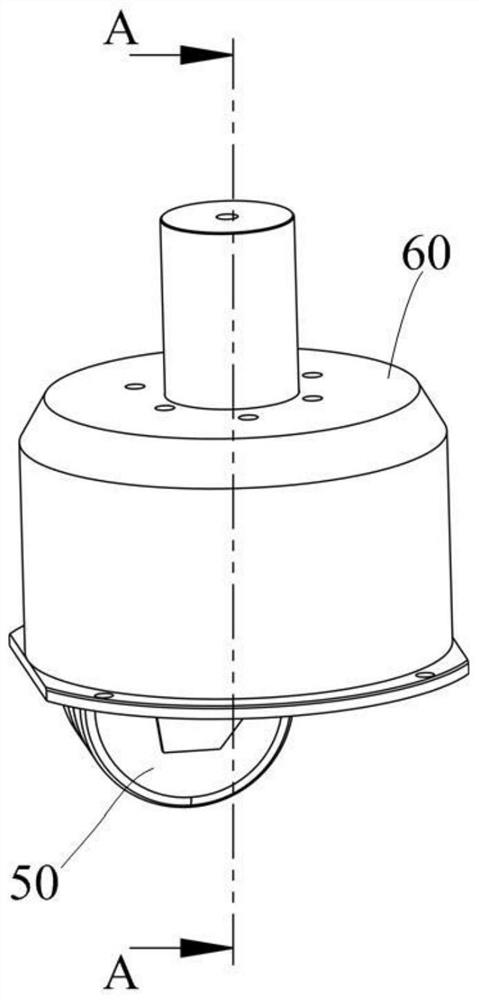
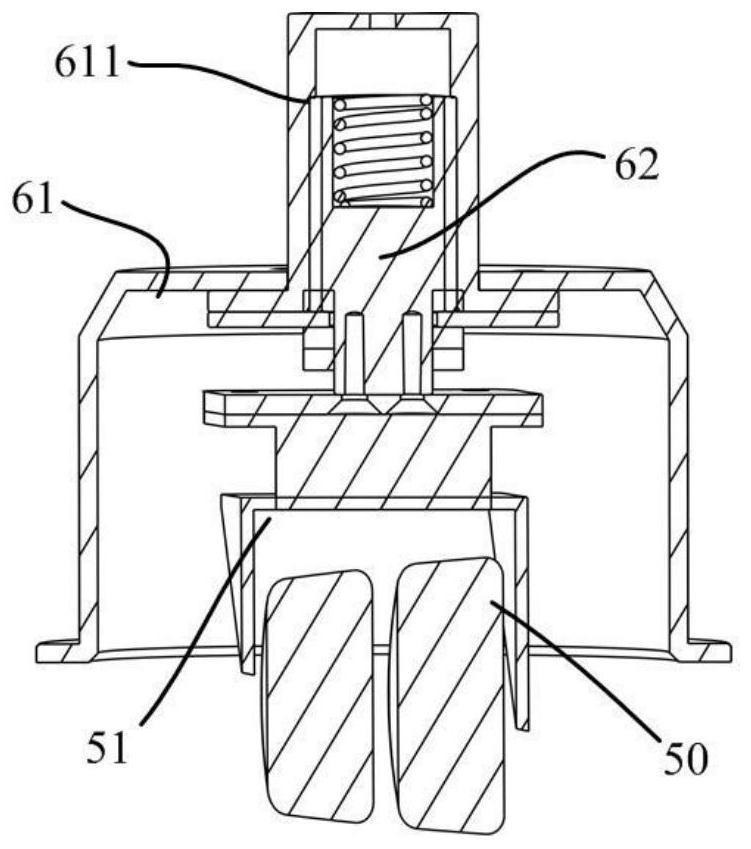
[0024] see Figure 1-Figure 3 As shown, the walking mechanism of the mobile robot provided in this embodiment mainly includes: a base plate 10, two driving wheels 20, two driving wheel suspension assemblies 30, a connecting frame 40, and at least one driven wheel 50, two driving wheels Both the suspension assembly 30 and the driven wheel 50 are arranged on the bottom plate 10 , and the two driving wheel suspension assemblies 30 are symmetrical about the driven wheel 50 .
[0025] In this embodiment, there are also two driven wheels 50 , and the two driven wheels 50 are oppositely arranged at both ends of the bottom plate 10 , and the two driving wheel suspension assemblies 30 are symmetrical to each other about the straight line where the two driven wheels 50 are located. For example, two driven wheels 50 are respectively arranged on both ends of the bottom plate 10 corresponding to the front and rear directions of the mobile robot body, and then two driving wheel suspension a...
Embodiment 2
[0042] This embodiment also provides a mobile robot, which includes: a mobile robot body, the walking mechanism of the mobile robot described in Embodiment 1, and the connecting parts between the mobile robot body and the two driving wheel suspension assemblies 30 34 fixed connections. Wherein, all the functions and features of the running gear have been described in detail in the first embodiment, and will not be repeated here.
[0043] To sum up, in the mobile robot and its walking mechanism provided by this embodiment, when the mobile robot crosses a hurdle, the driving wheel on one side moves upwards to drive the swing arm on this side to swing upwards, and drives the other side to swing upwards through the connecting frame. The swing arm of the robot swings upwards, so that the driving wheels on both sides swing synchronously, so as to avoid the phenomenon that the driving wheels slip due to the suspension of the mobile robot during the movement, and then avoid the accide...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More