

ADCP speed estimation and correction algorithm for deep diving manned submersible
A manned submersible, correction algorithm technology, applied in the information measurement of ground speed and ocean current speed, deep dive manned submersible ADCP speed estimation and correction algorithm field, can solve the problem that the ground speed and ocean current speed of the carrier cannot be directly measured Information and other issues to achieve accurate and reliable speed information
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0077] Below in conjunction with accompanying drawing and specific embodiment the present invention is described in further detail:
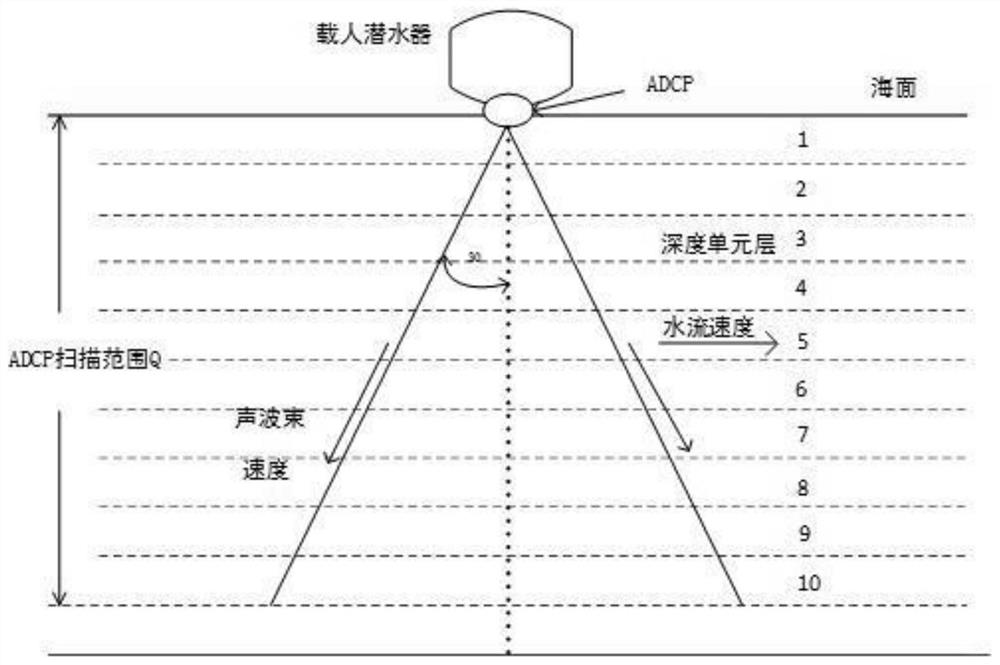
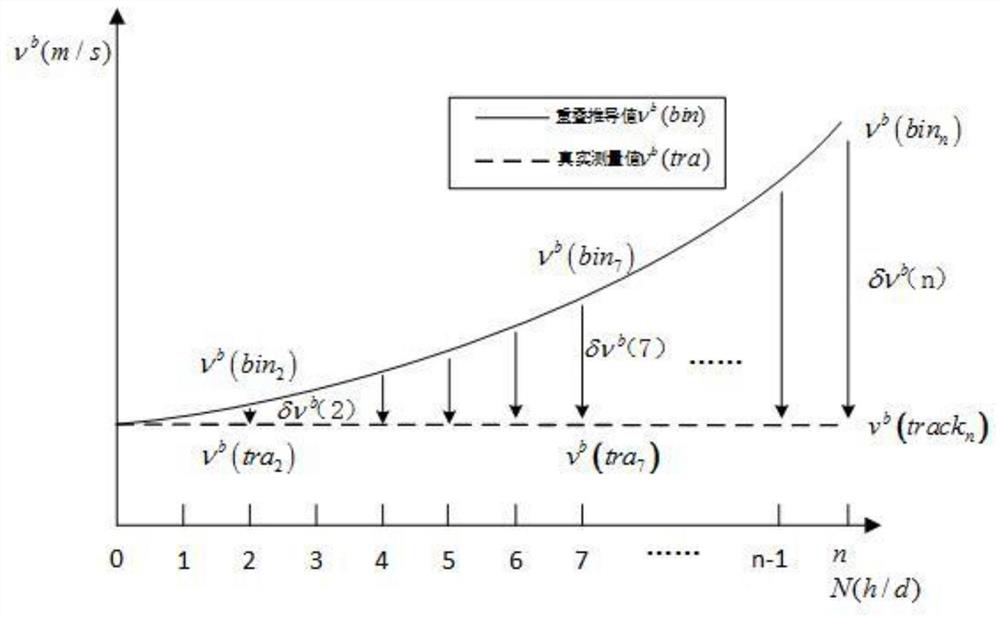
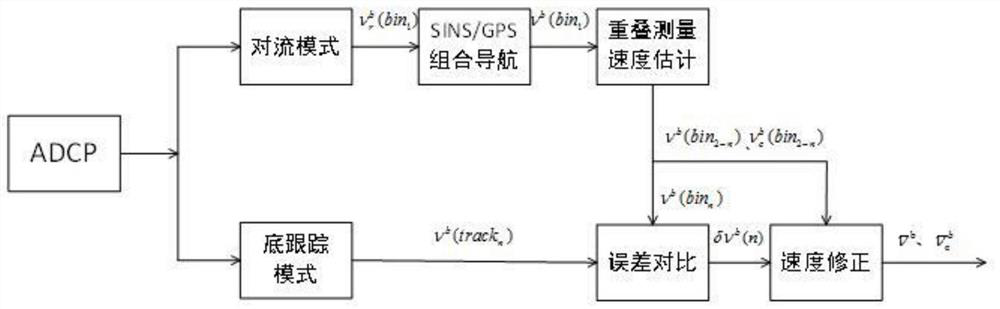
[0078] The invention provides an ADCP speed estimation and correction algorithm of a deep-diving manned submersible. In view of the fact that neither GPS nor DVL can directly measure the carrier's ground speed and ocean current speed information during the diving process in the deep sea area, the present invention proposes to provide the ground speed of the manned submersible at the initial moment through GPS / SINS integrated navigation, and then Using the deep-diving manned submersible ADCP to estimate the carrier's ground velocity and ocean current velocity, and based on the problem that the velocity estimation error accumulates with the diving depth.
[0079] The invention provides the ground speed of the manned submersible at the initial moment of diving through SINS / GPS integrated navigation without considering the acoustic positioning syste...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More