

An autonomous tracking system for ground unmanned platforms based on deep learning detection and tracking
An unmanned platform, detection and tracking technology, applied in control/adjustment systems, two-dimensional position/channel control, vehicle position/route/altitude control, etc., can solve the problems of high hardware cost, limited tracking accuracy, loss, etc. Achieve high target positioning accuracy, improve picture clarity, and reduce camera shake effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The present invention will be described in detail below with reference to the accompanying drawings and examples.
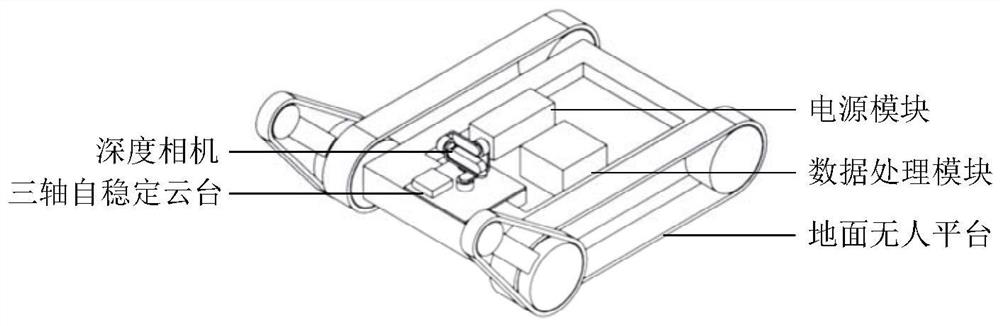
[0037] See attached figure 1 , an autonomous tracking system for ground unmanned platforms based on deep learning detection and tracking, including: ground unmanned platforms, three-axis self-stabilizing pan-tilts, depth cameras, data processing modules, and power supply modules.
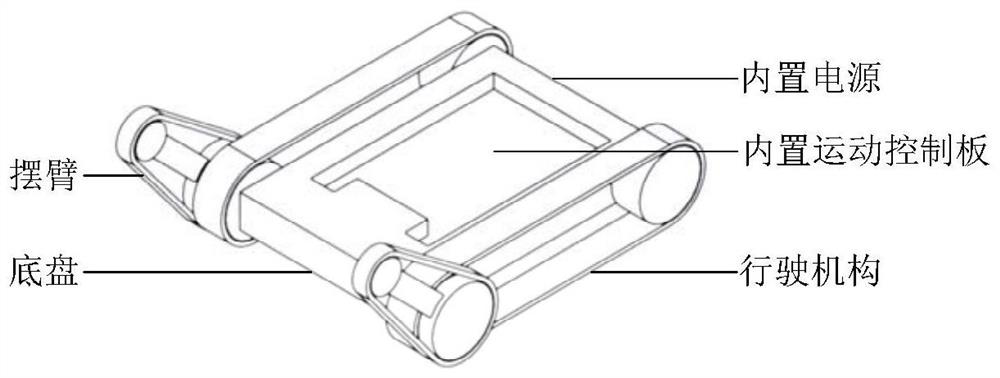
[0038] See attached figure 2 , The ground unmanned platform adopts a crawler-type driving mechanism, which has good trafficability in complex environments such as sandy land, soil, gravel, and cement ground. An adjustable swing arm is installed outside the front driving wheel, so that the platform has a certain ability to overcome obstacles, and can adapt to various complex scenes such as stairs, steep slopes, and tunnels.
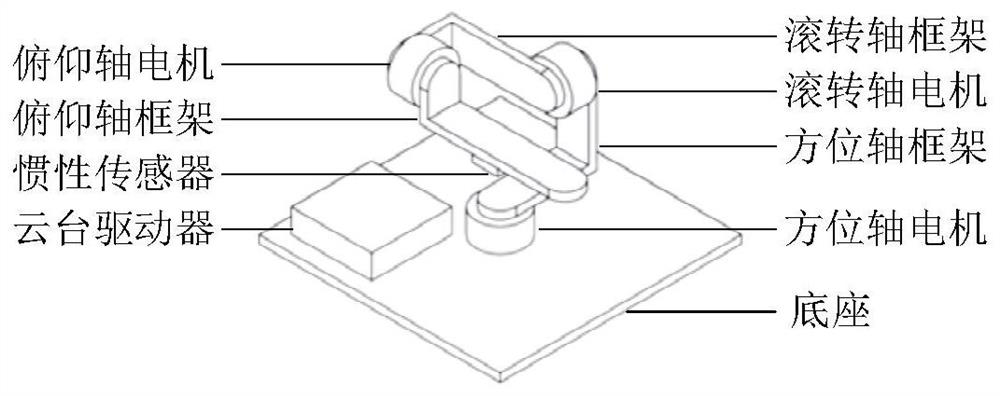
[0039] See attached image 3, The three-axis self-stabilizing pan / tilt is composed of a base, an azimuth axis frame, an azimuth axis motor, a roll axis ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More