

State prediction and estimation method for unmanned vehicle
A technology for unmanned vehicles and vehicle states, which is applied in the field of state estimation of unmanned vehicles and can solve problems such as control effect lag
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0136] The present invention will be described in detail below with reference to the accompanying drawings and examples.
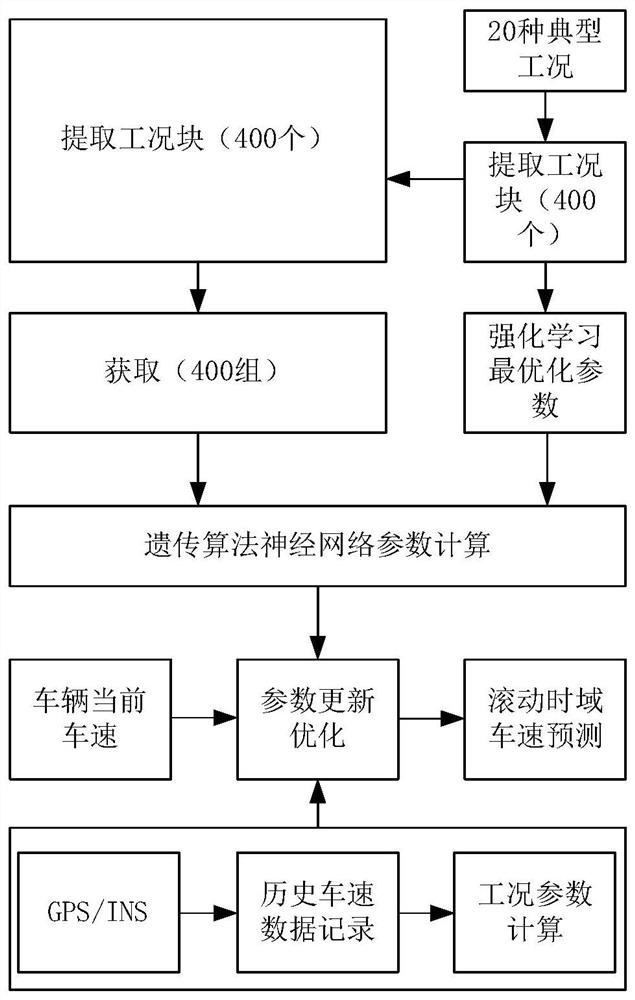
[0137] The invention proposes a state estimation method for distributed driving unmanned vehicles. Such as figure 1 As shown, first, a new velocity prediction method suitable for unmanned vehicles is proposed. For the known 20 working conditions, 400 working condition blocks with different lengths of time are randomly selected, and 10 features corresponding to each working condition block are extracted from them, and the proposed speed prediction formula with vehicle torque correction is used, and the acceleration and acceleration derivative The optimal parameters of the speed prediction formula are determined by such characteristics, and the genetic algorithm neural network is used for training, and the historical data of the vehicle's current driving conditions are introduced to update and optimize parameters such as acceleration and acceleration deriva...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More