

One kind of freedom four -foot software robot
A robot and degree-of-freedom technology, applied in the field of robotics, can solve problems such as low degree of freedom and inability to pass, and achieve the effect of flexible environmental adaptability, general power, and high control and intensive reading.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The present invention will be further described below in conjunction with drawings and embodiments.
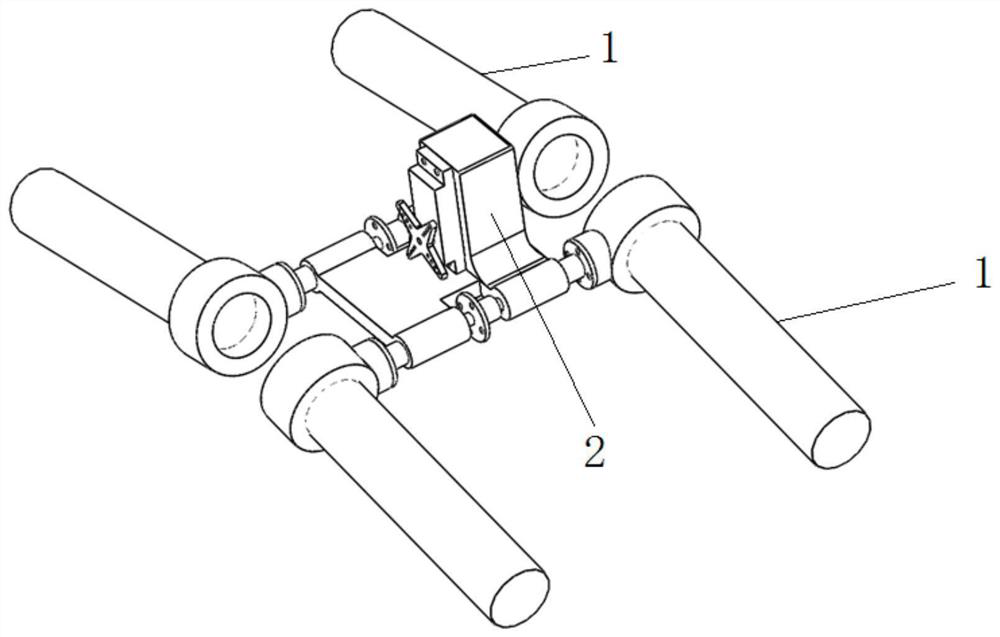
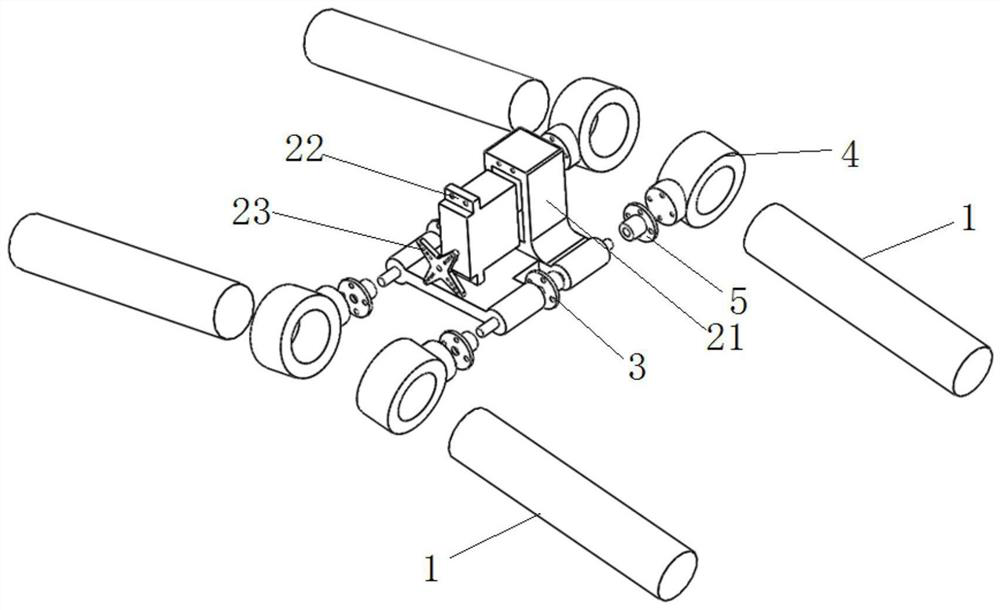
[0023] see Figure 1-2 , a multi-degree-of-freedom quadruped soft robot, comprising: 4 pneumatic legs 1, 4 pneumatic legs 1 are distributed in four corners, wherein, 4 pneumatic legs 1 are arranged in parallel to form 2 rows of pneumatic legs 1, each exhaust The moving leg 1 is vertically connected by the rotating shaft to form a "concave" shape. The two rotating shafts are arranged in parallel and connected by the mobile control part 1. The mobile control part 1 includes the steering gear base 21 and the steering gear 22; the two rotating shafts respectively pass through the The fixed tube on the side of the steering gear 22 seats 21, the steering gear 22 is installed in the cavity in the middle of the steering gear 22 seats 21, and the middle of the steering gear 22 is provided with a rotatable steering wheel 23; One flange 3, the two first flanges 3 and the steering...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More