

Map construction method based on low-cost vehicle-mounted 2D lidar
A two-dimensional laser radar and map construction technology, which is applied in the directions of electromagnetic wave re-radiation, instruments, and measuring devices, can solve problems such as unreliability, low execution efficiency, and large image data volume, and achieve low equipment installation costs The effect of reducing cumulative errors and simplifying the processing process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
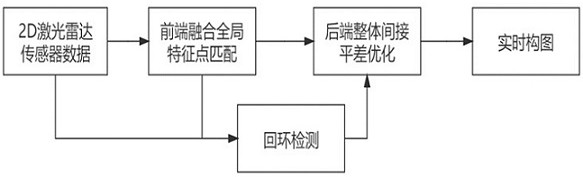
[0083] See attached figure 1 : A map construction method based on low-cost vehicle-mounted two-dimensional lidar, including the following steps:
[0084] Step S1, analyzing data:
[0085] Obtain the current frame scanning point cloud of the 2D lidar scanning output; analyze the coordinate system of multiple scanning points and the current frame scanning point cloud from the current frame scanning point cloud;
[0086]Step S2, setting the reference coordinate system of the global point cloud map;
[0087] Step S3, initialize the global point cloud map:
[0088] When the scanned point cloud of the current frame is obtained as the scanned point cloud of the first frame, the feature points are obtained from the scanned points of the scanned point cloud of the first frame, and the scanned points and feature points of the scanned point cloud of the first frame are imported into the global point cloud map The initial global point cloud map is formed in the coordinate system; the f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More