

Four-degree-of-freedom three-dimensional laser radar sensing device for unmanned driving
A three-dimensional laser and sensing device technology, applied in the field of intelligent sensing, can solve problems such as accidents, wrong path planning of unmanned driving systems, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] In order to facilitate understanding of the present invention, the present invention will be further described below with reference to the accompanying drawings and specific embodiments.
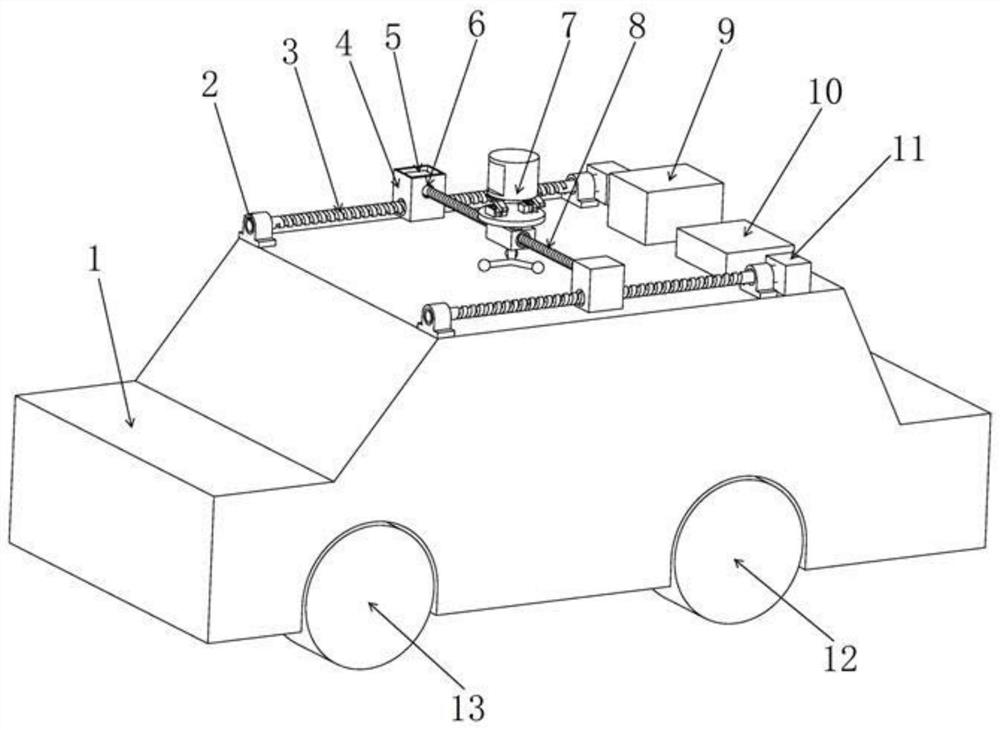
[0024] like figure 1 As shown, it is a schematic diagram of the overall structure of an unmanned vehicle equipped with a four-degree-of-freedom three-dimensional laser radar sensing device according to the present invention, including a body 1, a bearing seat 2, a longitudinal ball screw 3, a longitudinal movement pile 4, and a transverse movement motor 5 , rolling bearing 6 , three-dimensional laser radar sensor device 7 , transverse ball screw 8 , power supply module 9 , controller 10 , longitudinal motor 11 , driving wheel 12 , guide wheel 13 . Four wheels are installed at the bottom of the body 1, two driving wheels 12 are installed at the rear for driving the unmanned vehicle, and two guide wheels 13 are installed at the front for steering the unmanned vehicle; the power module ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More