Wall-climbing robot and wall surface transition method thereof
A wall-climbing robot and robot technology, applied in the field of wall-climbing robots, can solve the problems of wheeled and crawler-type wall-climbing robots inflexible movement, loss of pressure, poor obstacle avoidance ability, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] In order to make the above objects, features and advantages of the present invention more comprehensible, specific embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings.
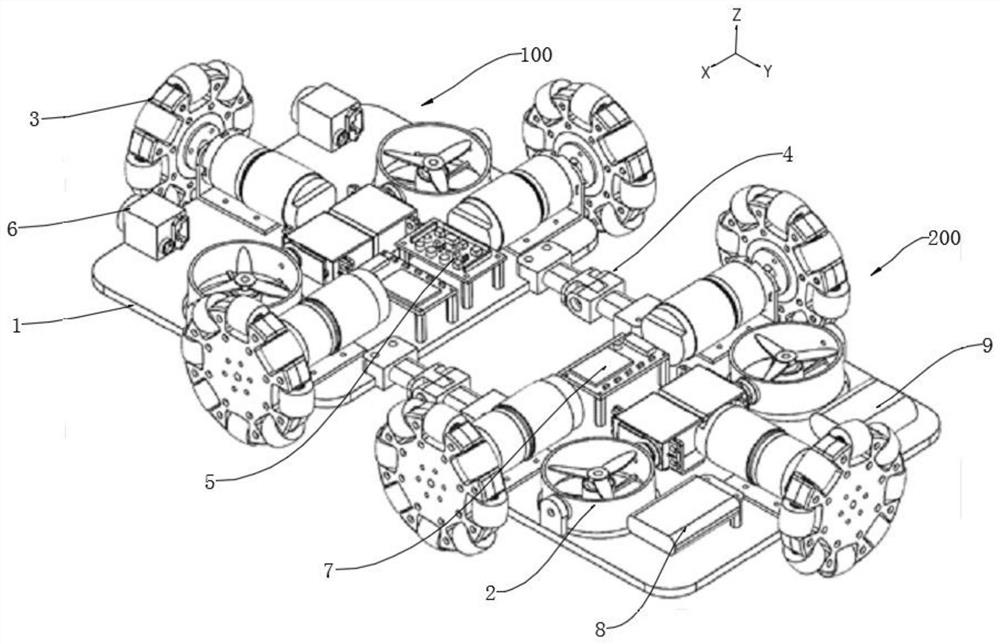
[0046] In addition, the up, down, left, right, front, and back mentioned in the embodiments of the invention refer to when the wall-climbing robot of the present invention is vertically placed on the ground (attached figure 1 The placement position in ) corresponds to the position of the entire wall-climbing robot; among them, X positive represents "left", X reverse represents "right", Y positive represents "back", Y reverse represents "front", Z positive To represent "up", Z reverse represents "down".
[0047] see figure 1 As shown, the embodiment of the present invention provides a wall-climbing robot, including two single robots, each single robot includes a chassis 1, a thrust reverse mechanism 2 and three sets of translation mechanisms...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More