

Rope-driven wrist module based on three-degree-of-freedom series-parallel hybrid mechanism and use method of rope-driven wrist module
A hybrid mechanism and degree of freedom technology, applied in the directions of manipulators, program-controlled manipulators, joints, etc., to achieve the effect of simple and compact structure, solving the problem of rope coupling, and good bionics
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The present invention will be further described in detail below in conjunction with the embodiments and the accompanying drawings, but the embodiments of the present invention are not limited thereto.
[0038] see Figure 1-10 , the present invention provides a technical solution:
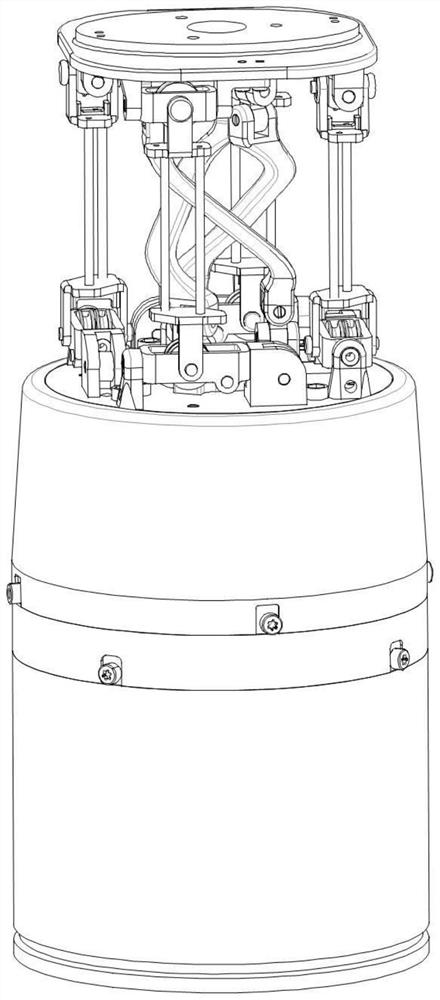
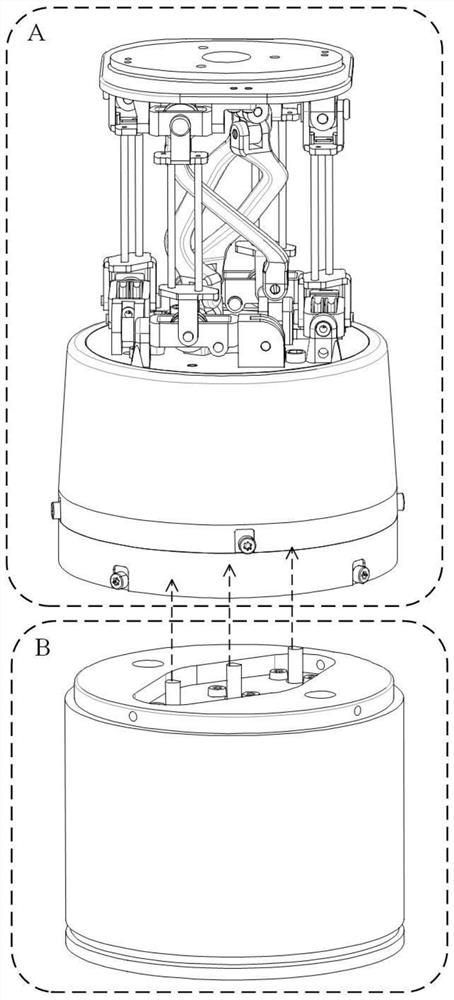
[0039] The present invention proposes a rope-driven wrist module based on a three-degree-of-freedom serial-parallel hybrid mechanism and its application method, such as figure 1 , 2 As shown, the wrist module is composed of a three-degree-of-freedom series-parallel module A and a drive control integrated module B, which are fixed by screws on the side of the housing for easy connection and disassembly.
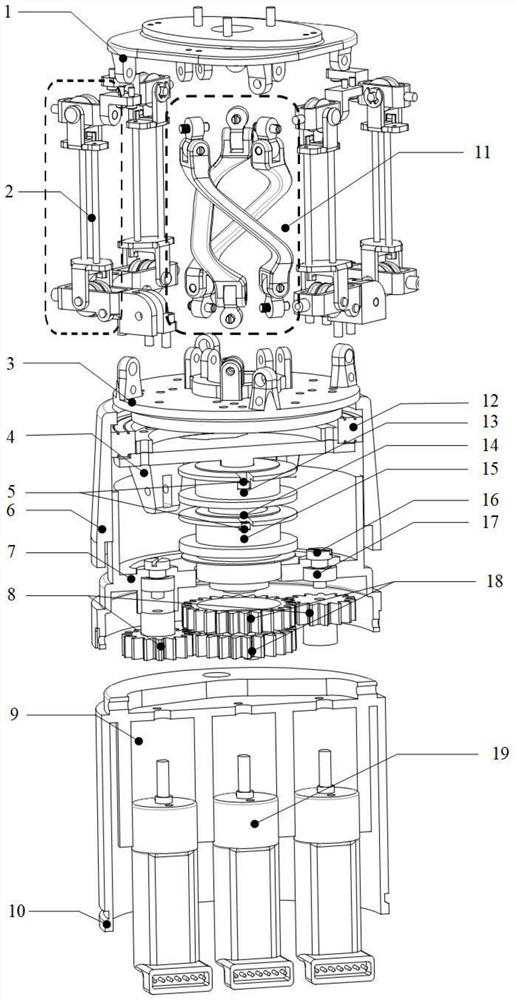
[0040] The three-degree-of-freedom series-parallel module A, such as image 3 As shown, the upper platform 1 of the parallel mechanism, the tension amplification mechanism 2, the lower platform 3 of the parallel mechanism, the rotating connection table 4, the rope fixing screw 5, the thre...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More