

Design method of full-dynamic mobile robot chassis with self-adaptive adjustment function
A mobile robot and self-adaptive adjustment technology, applied in the direction of motor vehicles, elastic suspensions, suspensions, etc., can solve the problems of not being able to turn quickly, slow moving speed, high price, etc., to improve the ability to overcome obstacles, ensure stability, The effect of improving reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] Next, the technical solutions in the embodiments of the present invention will be apparent from the embodiment of the present invention, and it is clearly described, and it is understood that the described embodiments are merely embodiments of the present invention, not all of the embodiments. Based on the embodiments of the present invention, there are all other embodiments obtained without making creative labor without making creative labor premises.
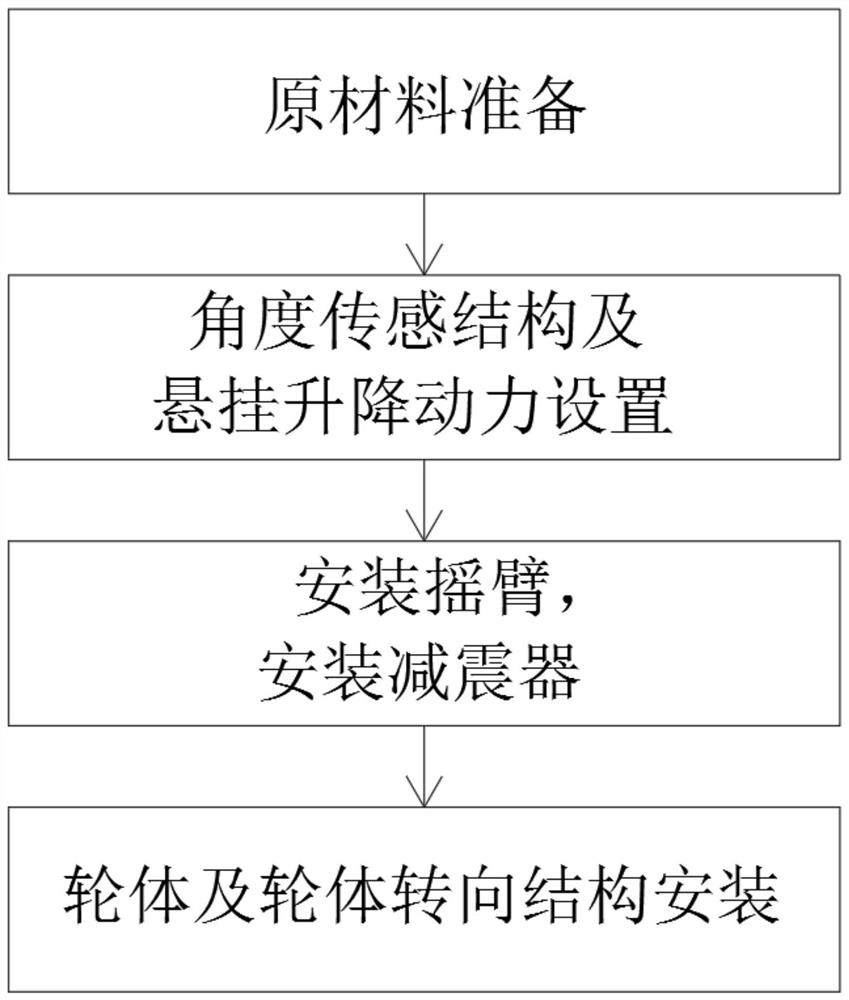
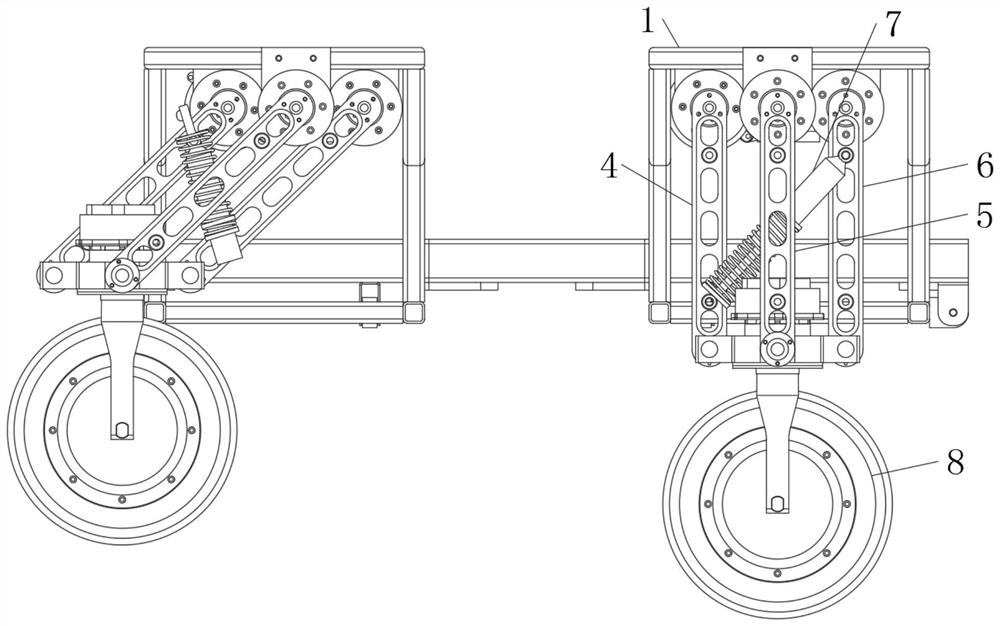
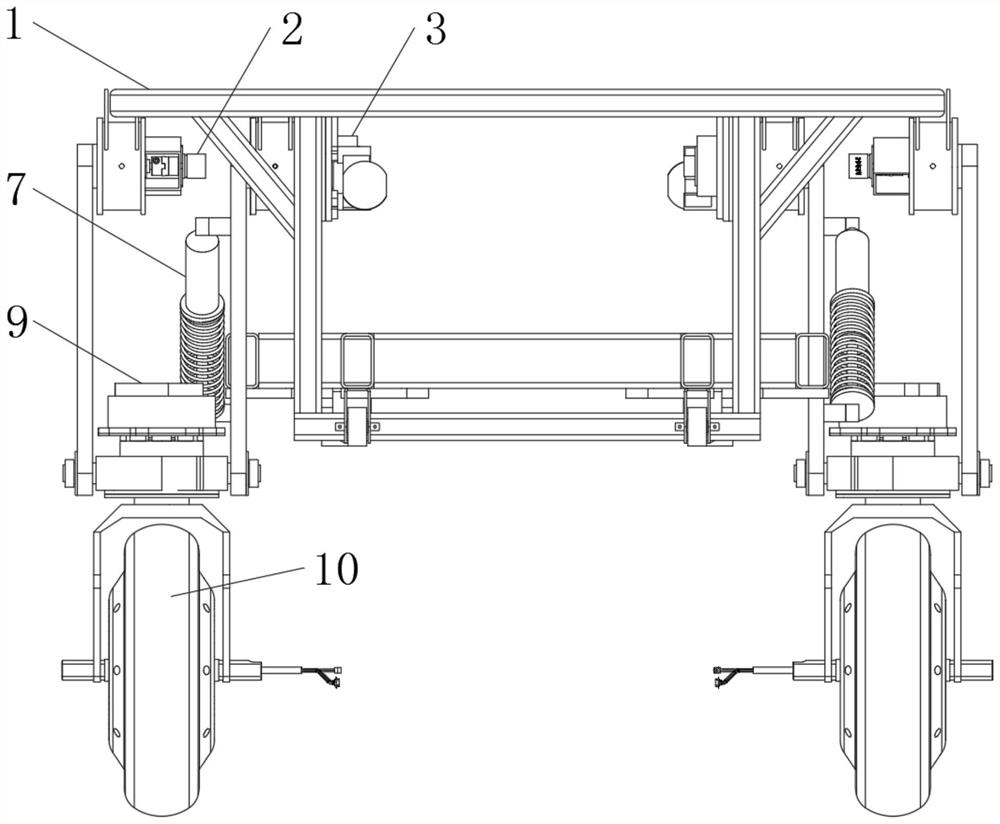
[0042] See Figure 1-5 Fully dynamic mobile robot chassis design method with adaptive adjustment function, including raw material preparation - angle sensing structure and suspension lifting power setting - mounting rocker arm, mounting shock absorber 7-wheel body and wheel steering structure mounting design steps, Specific steps are as follows:
[0043] (1) Raw material Preparation: A certain amount of frame body 1, angle sensor 2, suspended lift motor 3, rocker arm, shock absorber 7, tire, hub motor 10 and tire steering mo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More