Multi-unmanned aerial vehicle cooperative route planning method for tracking ground target in dual-mode circling manner
A multi-drone, track planning technology, applied in mechanical equipment, combustion engines, navigation computing tools, etc., can solve problems that are rarely considered in the urban environment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
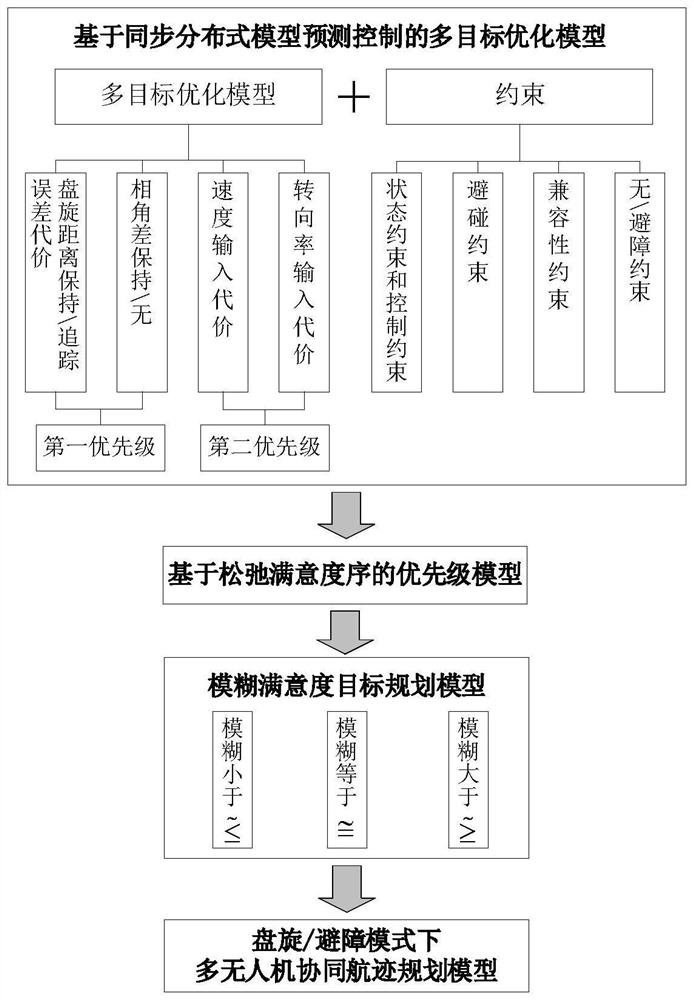
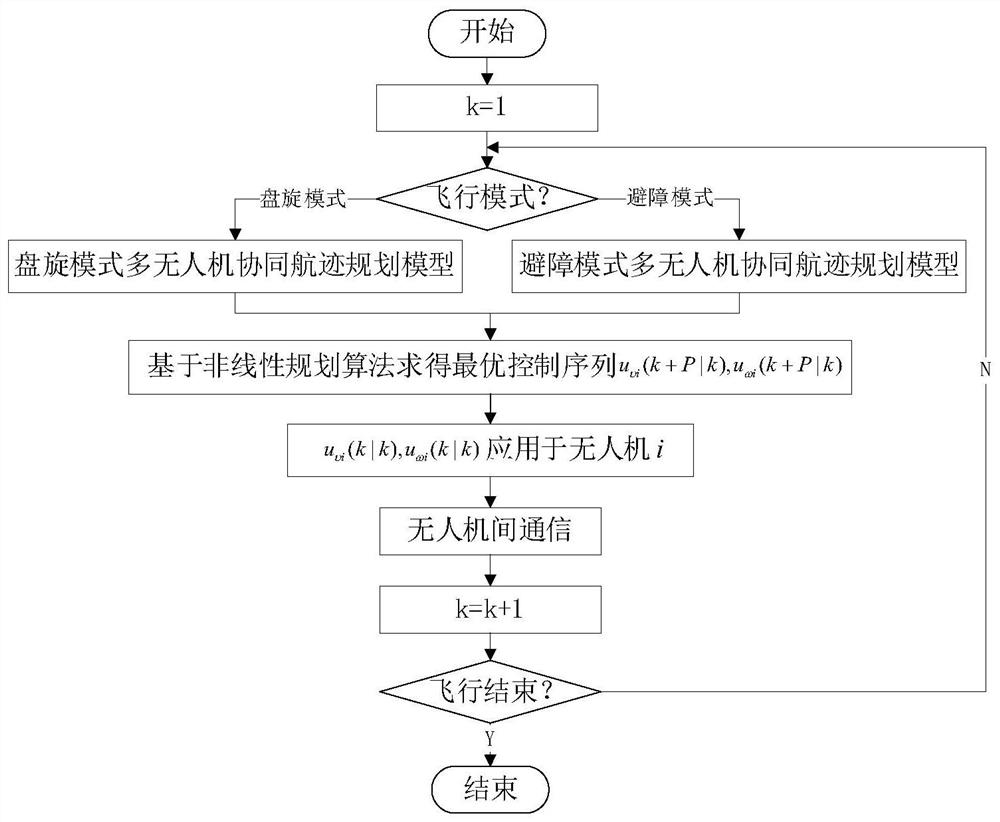
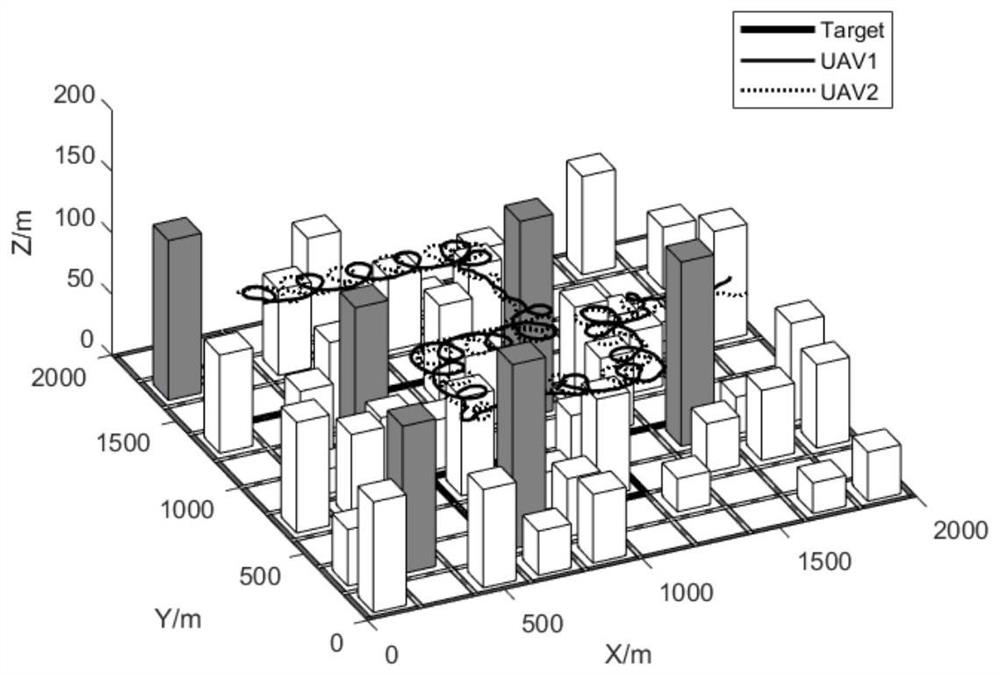
[0089] Aiming at the problem that the conventional multi-UAV cooperative track planning is difficult to adapt to the urban environment, the present invention adopts a dual-mode switching tracking strategy in which the hovering mode is the main mode and the obstacle avoidance mode is the supplementary mode to realize the precise tracking of ground targets. The multi-UAV cooperative trajectory planning algorithm for dual-mode circling tracking of ground targets can be used for monitoring and tracking of low-speed moving targets in urban environments. The specific process is as follows:
[0090] 1. Based on the background of multi-UAV tracking low-speed ground target tracking in the city, construct the UAV kinematics model, ground target motion model and 3D urban environment model.
[0091] First, the kinematics model of the UAV is introduced. The fixed-wing UAV model adopted in the present invention is a dual-input UAV kinematics model with speed and heading maintaining function...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com