

Mechanical arm layout structure of minimally invasive surgical robot
A technique of surgical robot and minimally invasive surgery, applied in the field of mechanical arm layout structure, to achieve the effect of expanding the distribution range, high applicability, and improving the overall rigidity and stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
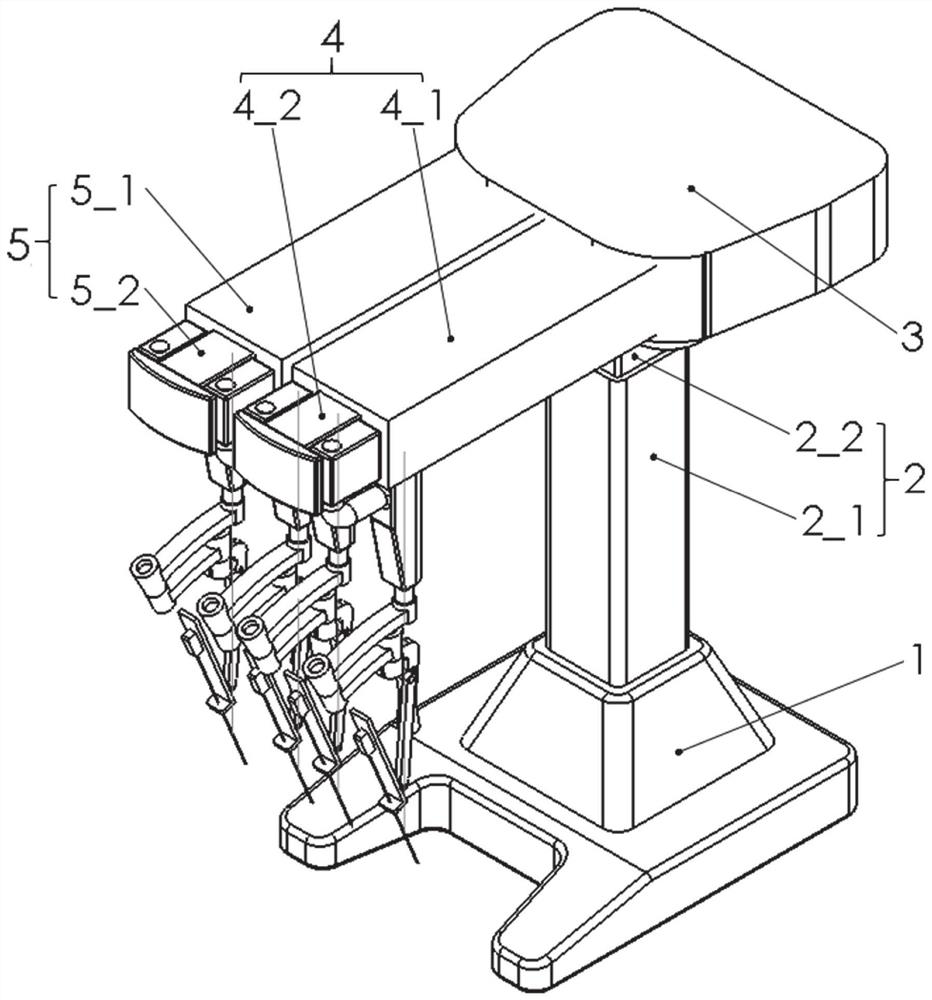
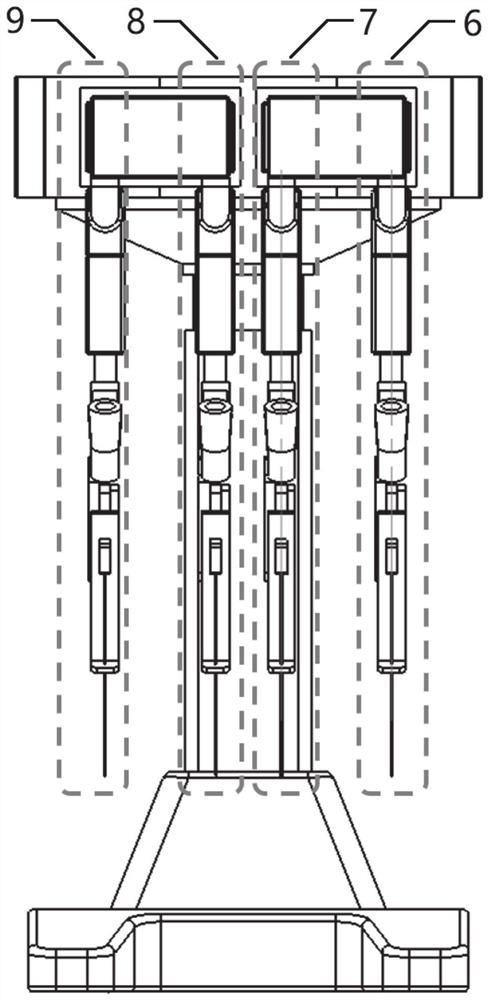
[0046] A typical embodiment of the application 1 such as Figure 1-Figure 3 As shown, what it discloses is a structural schematic diagram of the layout structure of the mechanical arm of the minimally invasive surgical robot in a non-working state, which includes a base 1, a column 2, a top platform 3, an adjusting main arm I4, an adjusting main arm II5, an adjusting branch Arm I6, adjusting sub-arm II7, adjusting sub-arm III8 and adjusting sub-arm IV9; it should be noted that, in actual use, one adjustment main arm can be set, and one or two or three or five adjustment sub-arms can also be set. One, six, etc. are set according to the actual situation. In this embodiment, two adjusting main arms and four adjusting sub-arms are taken as examples for illustration.
[0047] Each of the above structures is described in detail below:
[0048] The base 1 is used to fix and support the entire robot structure; the column is a liftable column, and the liftable end is connected to the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More