

Unmanned ship fin stabilizer executing mechanism based on bevel gear transmission
A technology of bevel gear transmission and actuator is applied in the direction of using hydrofoils to act on the surrounding water surface to reduce the movement of ships, which can solve the problem of taking up a lot of time for debugging and adjustment, small space in the cabin of small unmanned boats, and insufficiency of the space occupied by the cabin. and other problems to achieve the effect of reducing the debugging time, reducing the space occupied by the fin actuator, and reducing the space occupied by the fin actuator
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
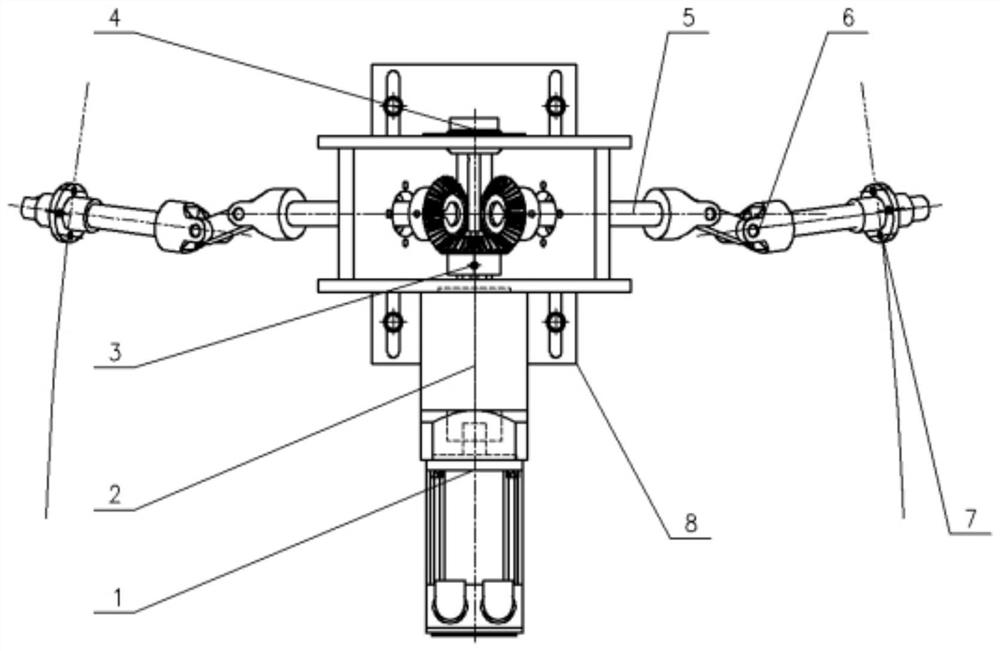
[0016] Such as figure 1 As shown, the unmanned boat fin stabilizer actuator of the present invention is mainly composed of a servo motor 1, a reducer 2, a bevel gear set 3, a potentiometer 4, a transmission shaft 5, a universal joint 6, a mounting seat 7 and a support seat 8 and so on. The servo motor 1 and the reducer 2 are connected by bolts, and the torque is transmitted by the key; the output shaft of the reducer 2 is connected with the bevel gear set 3, and the bevel gear set 3 is installed on the support base 8; the support base 8 is fixed on the unmanned boat by bolts Bottom plate; the bevel gear set 3 consists of three bevel gears arranged at a certain angle to form two pairs of rotating pairs, wherein the driving bevel gear is fixedly connected to the output shaft of the reducer 2, and the two driven bevel gears are meshed with the driving bev...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More