

Plant protection quad-rotor unmanned aerial vehicle height control method based on pesticide liquid measurement
A quadrotor unmanned aerial vehicle and height control technology, which is applied in the field of unmanned aerial vehicles, can solve the problems affecting the accuracy and uniformity of the spraying operation of the plant protection quadrotor unmanned aerial vehicle, and the instability of height control, so as to overcome the adaptive ability, Improve the anti-interference ability and estimate the effect of fast
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0043] The specific working process of the present invention will be further described in detail below in conjunction with the accompanying drawings.
[0044] The four-rotor UAV for plant protection implemented by the present invention is equipped with a medicine box, and the medicine box is equipped with a liquid medicine. The bottom of the medicine box is connected with a nozzle, and the medicine liquid flows out from the nozzle for spraying. The medicine box containing the liquid medicine is connected with the nozzle through a pipeline, and a flow meter is installed in the pipeline. The liquid medicine fills the medicine box, and the volume of the remaining medicine liquid in the medicine box can be known in real time by knowing the volume of the medicine box and the flow rate measured by the flow meter.
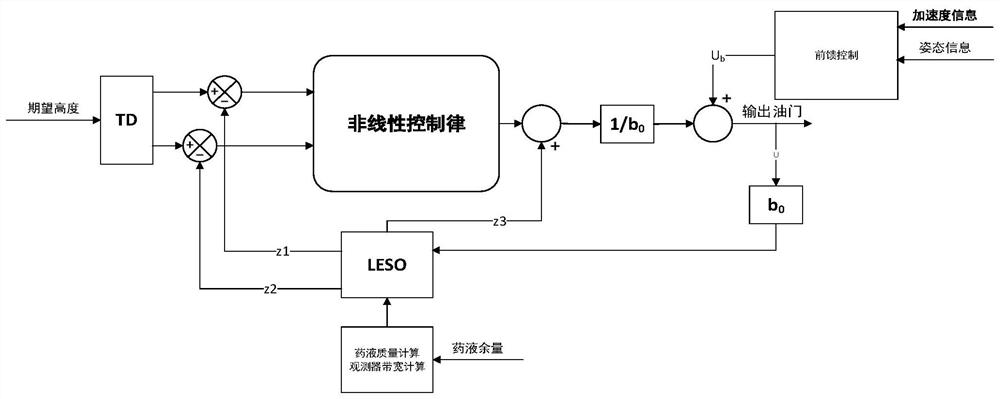
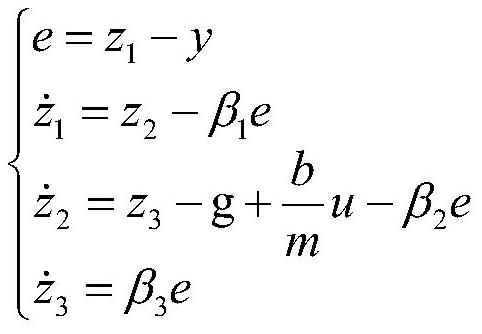
[0045] Establish the following control system:
[0046] Including the linear differentiator TD, the linear differentiator TD receives the desired height input by the use...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More