

Ankle joint driving structure device for anthropomorphic robot
A technology of anthropomorphic robot and transmission structure, which is applied in the field of anthropomorphic robot ankle joint transmission structure device, which can solve the problems of many parts, lower bending strength of ankle joint transmission structure device, technical difficulty, etc., achieve easy processing and assembly, and reduce motion interference The effect that the performance and precision requirements are easy to meet
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
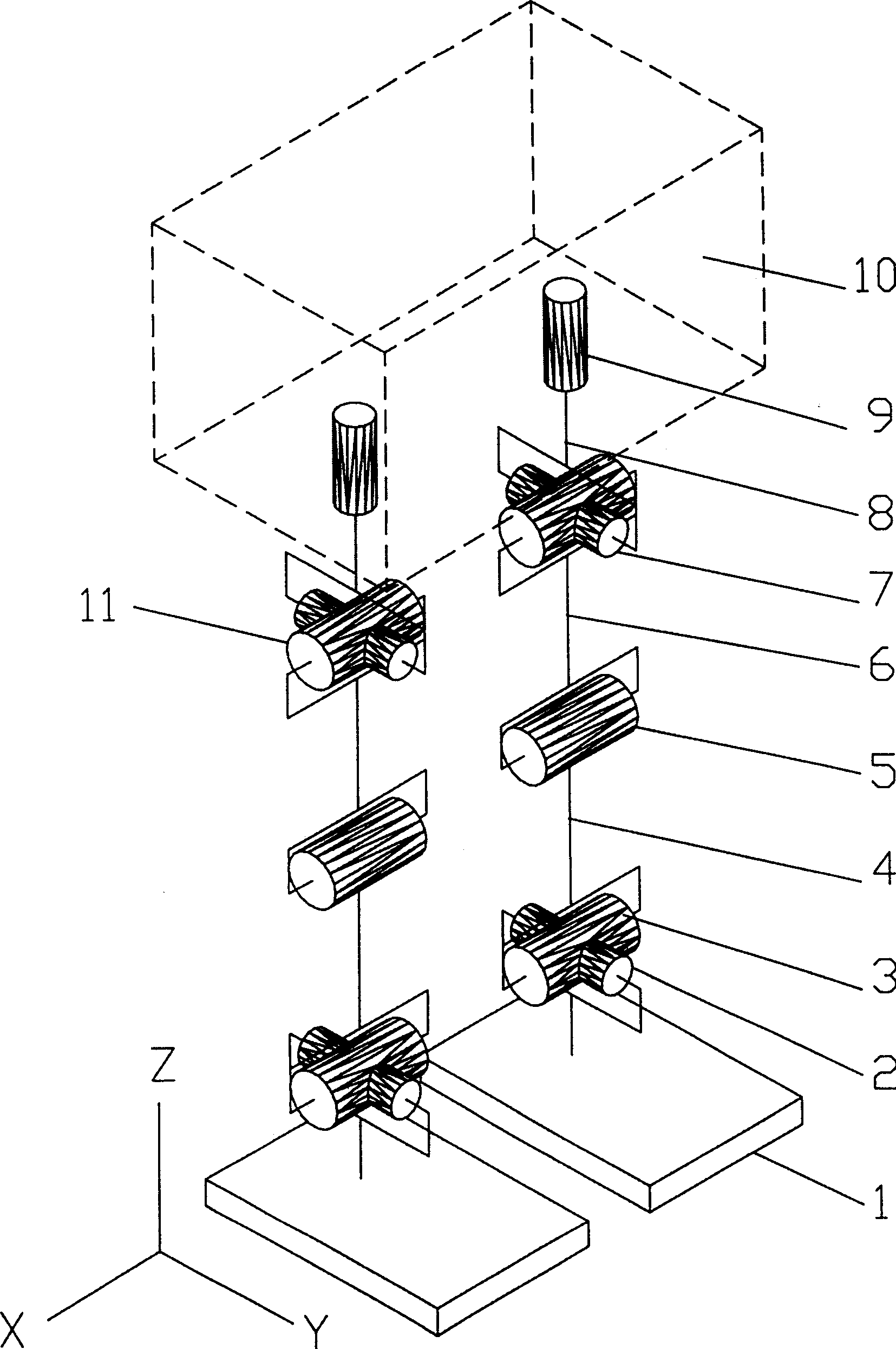
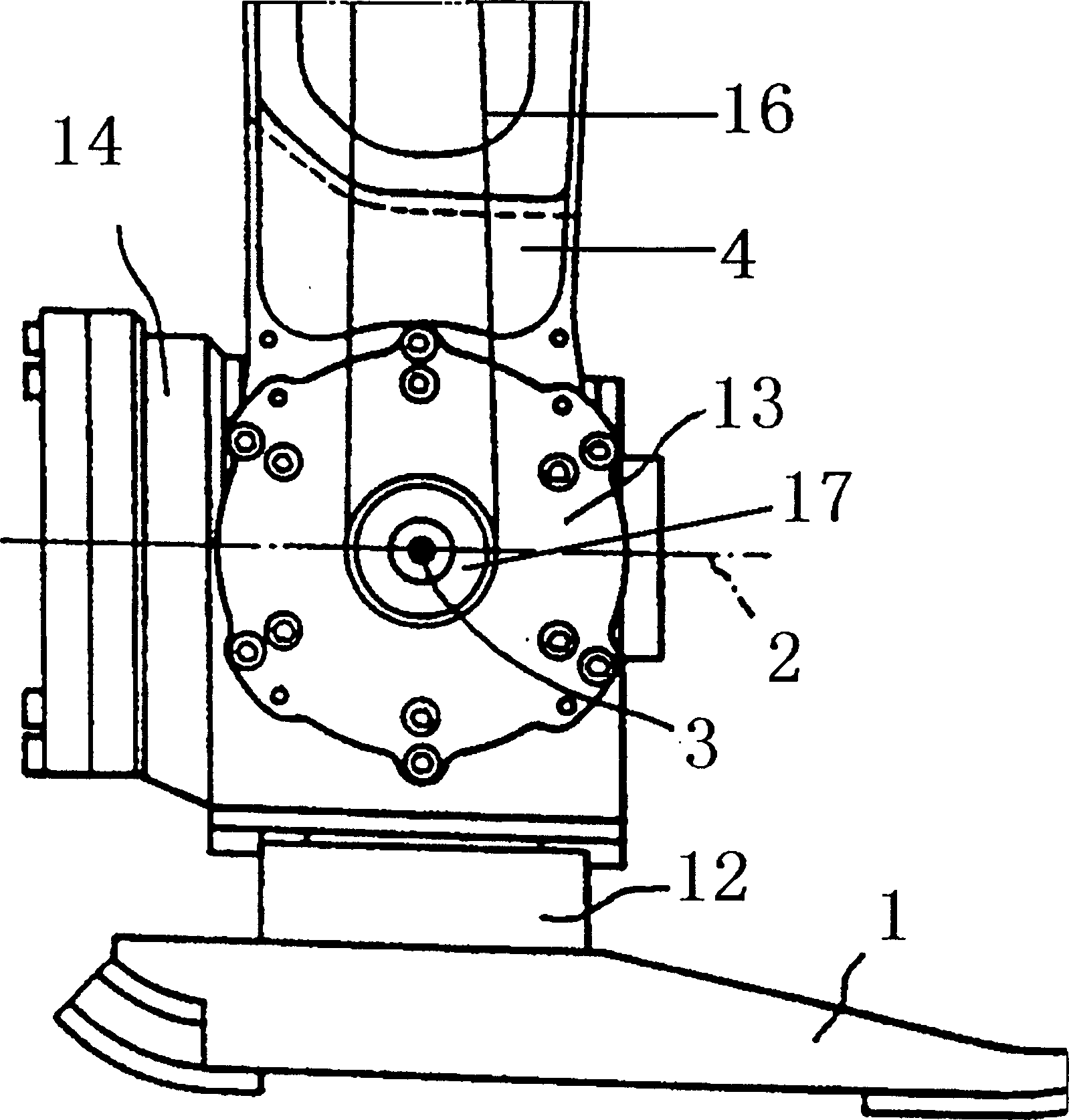
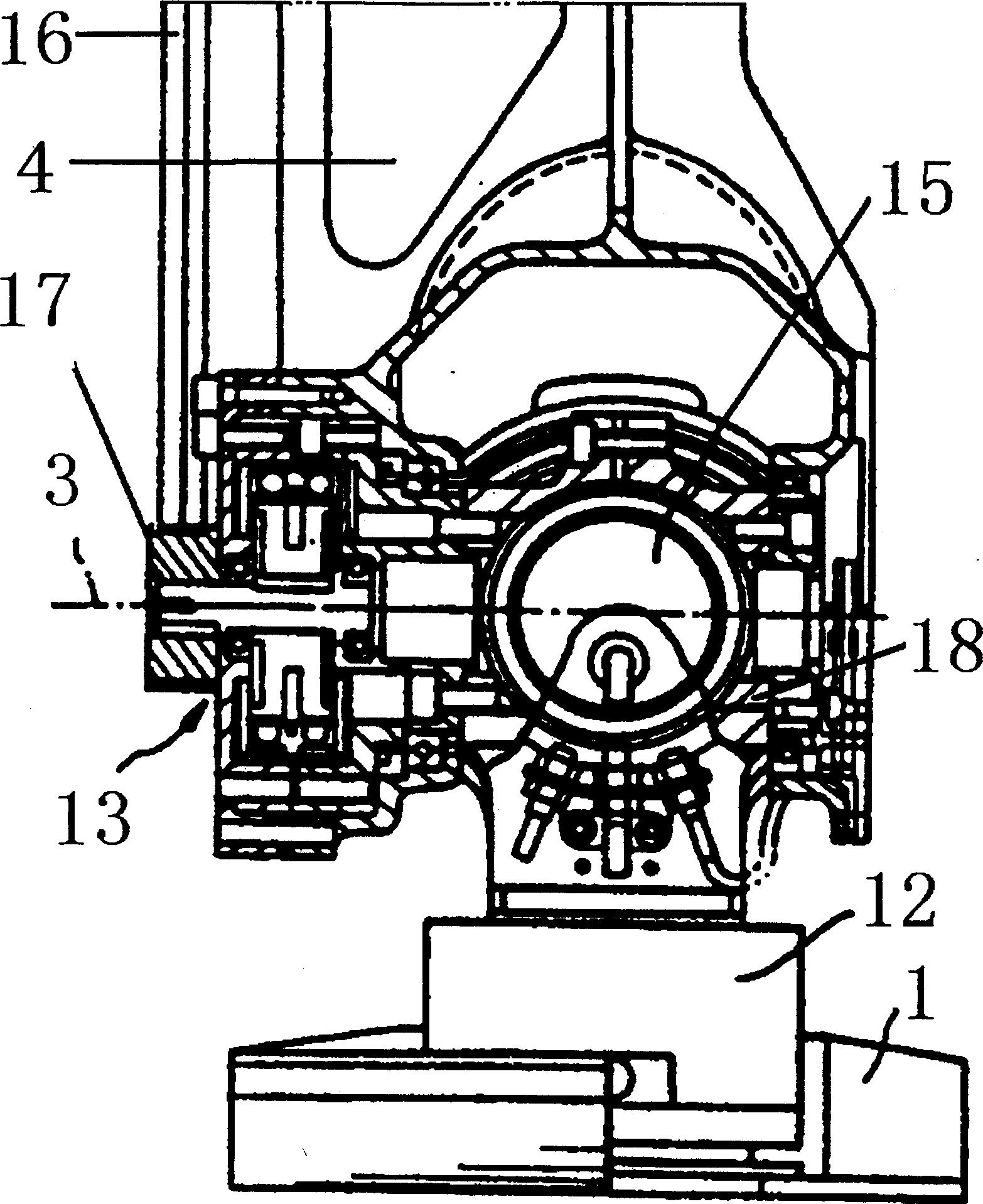
[0022] Combined with the accompanying drawings, the composition and action process of the ankle joint transmission structure of the anthropomorphic robot are explained as follows:
[0023] Anthropomorphic robot ankle joint transmission structure of the present invention is made up of three parts of ankle joint roll transmission system, ankle joint pitch transmission system, support (see Image 6 ). For the motor 25 of the roll transmission system, one end of its output shaft is fixedly connected to the eccentric crank wheel 32 of the transmission mechanism, and the eccentric shaft of the eccentric crank wheel 32 is connected to one end of the connecting rod 26. For the specific structure of the connecting rod transmission mechanism, see the Chinese patent application 01115517.5. Hole is arranged on this connecting rod 26 and is installed on the fulcrum 19 on the support 18 (seeing Figure 5 ), so that the connecting rod and the fulcrum form a relative rotation, thereby reali...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More