

Cleaning and corrosion-preventing robot for inner wall of variable-diameter pipeline and using method
A robot and pipeline technology, applied in cleaning methods and utensils, chemical instruments and methods, cleaning hollow objects, etc., can solve problems such as health hazards, avoid hazards, ensure cleaning effects, and improve work efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
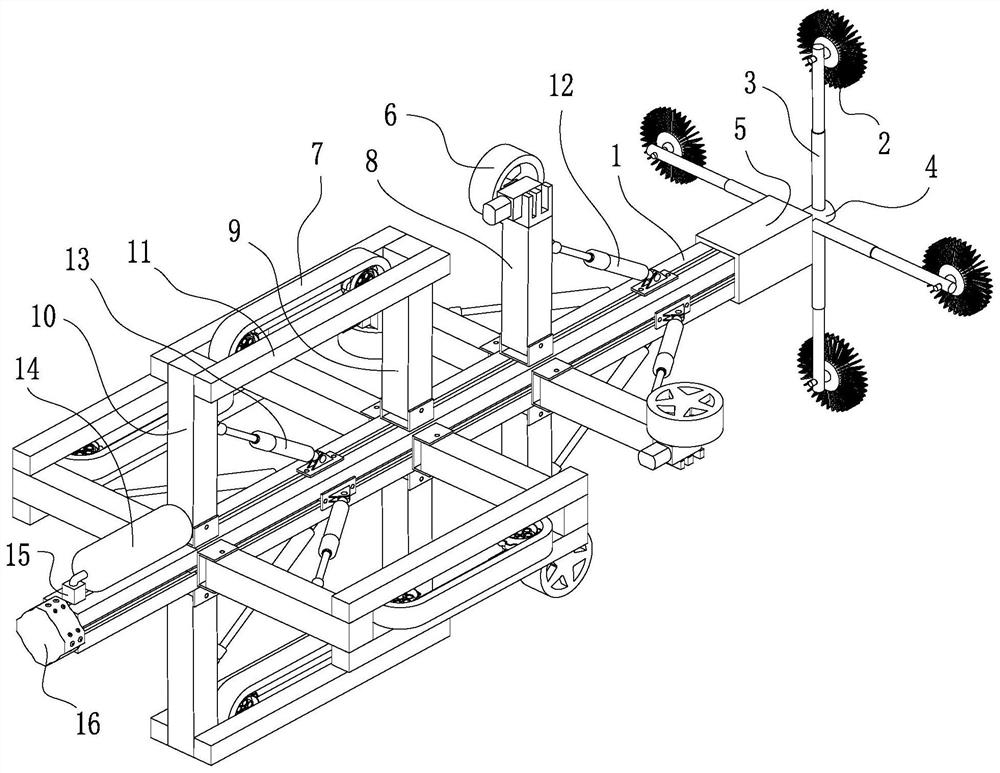
[0022] Such as figure 1 As shown, a variable-diameter pipeline inner wall cleaning and anticorrosion robot includes a central frame 1, a pipeline inner wall cleaning component, a walking component, and a pipeline inner wall anticorrosion liquid spraying component; Components are laid out sequentially on the central rack 1 from front to back.
[0023] The pipeline inner wall cleaning assembly includes a cleaning steel brush 2, a power telescopic rod 3, an adapter fixing sleeve 4 and a cleaning drive motor 5; The frame 1 is coaxially arranged and the motor shaft of the cleaning drive motor 5 faces forward, and the transfer fixing sleeve 4 is fixedly installed on the motor shaft of the cleaning drive motor 5; the bottom end of the power telescopic rod 3 is fixedly connected to the transfer fixing On the cover 4, the cleaning steel brus...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More