

Transformation error compensation method for robot flexible joints based on improved pi structure
A flexible joint and error compensation technology, applied in the field of robot flexible joint conversion error compensation based on improved PI structure, can solve the problems of reduced modeling accuracy, non-smooth, asymmetry, etc., and achieve the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with specific examples.
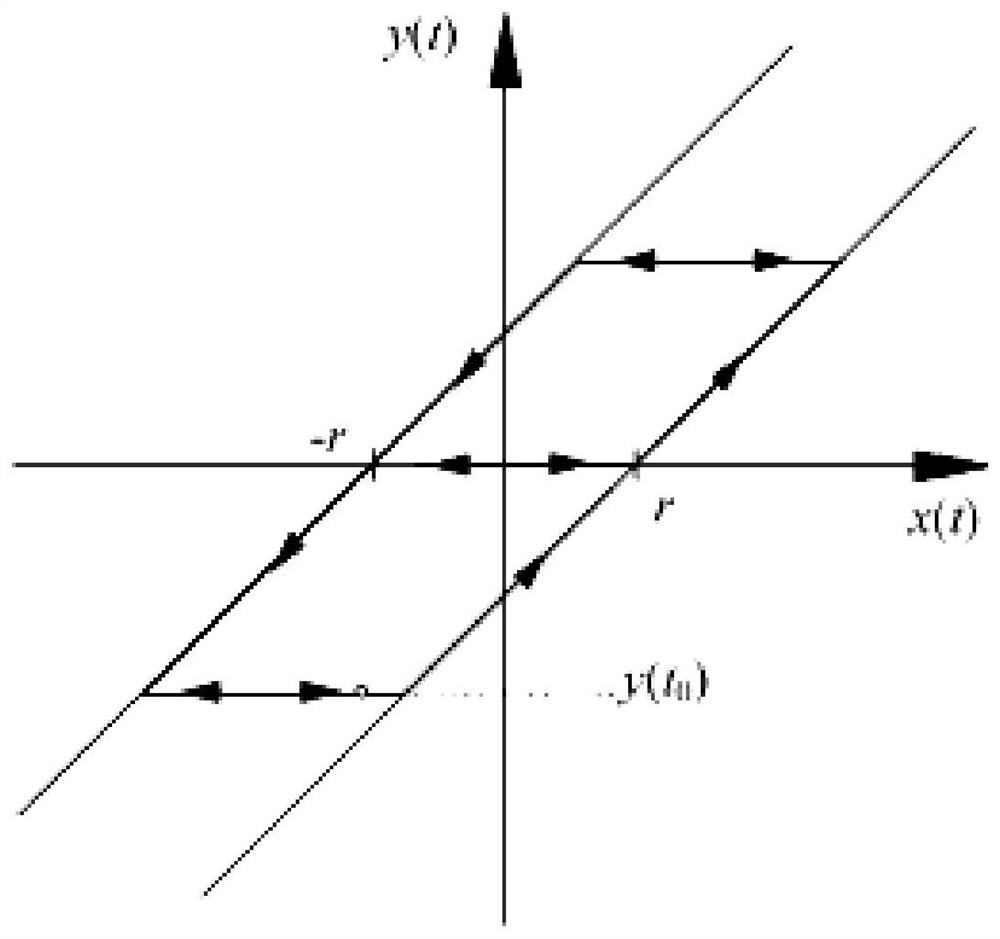
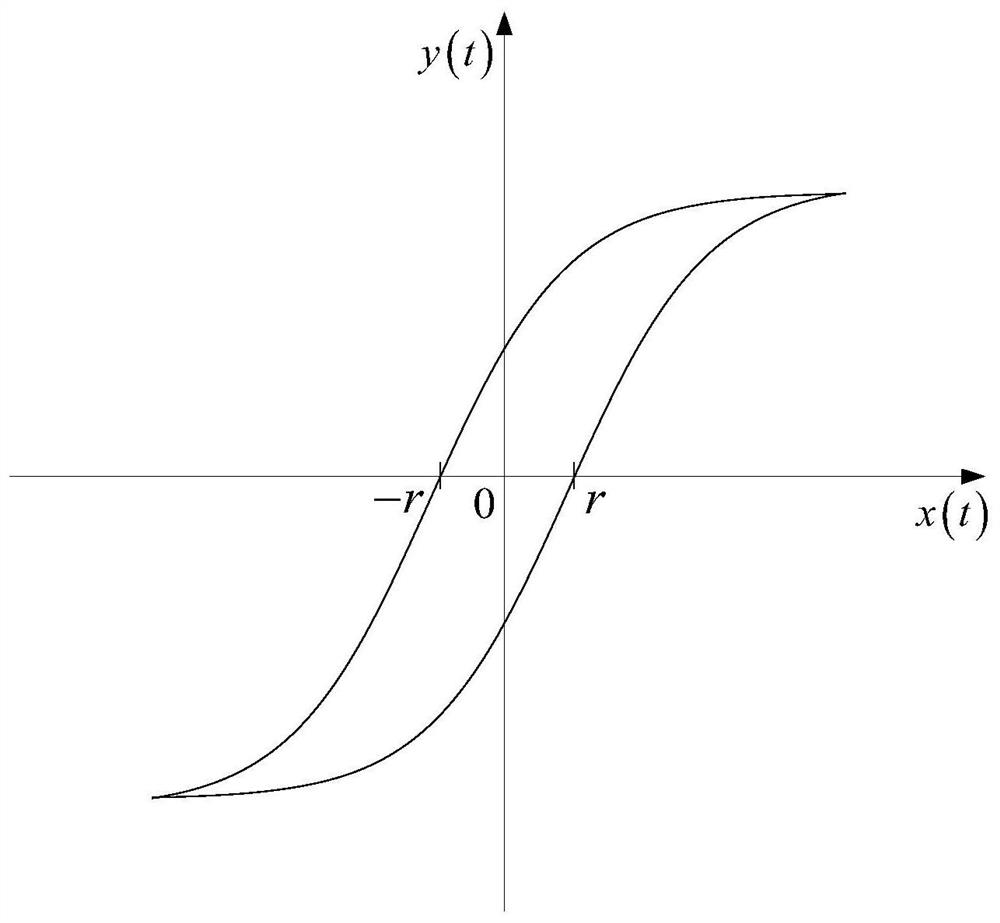
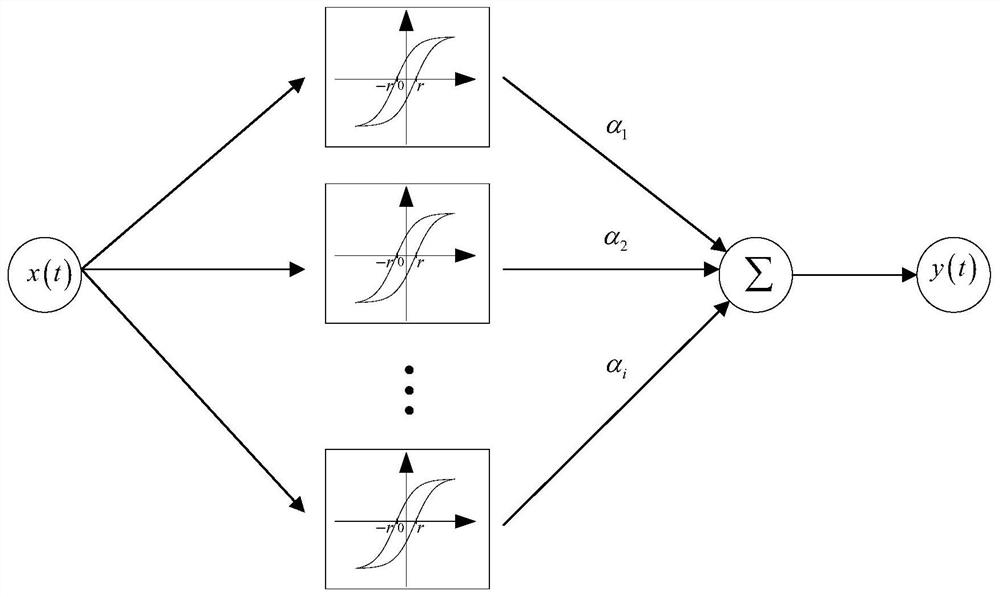
[0022] Aiming at the special and complex hysteresis characteristics of the flexible joints of industrial robots, based on a designed nonlinear hysteresis operator, under the structure of the PI hysteresis model, a neural network hysteresis model is constructed to analyze the non-linear hysteresis characteristics exhibited by the hysteresis characteristics. Symmetrically complex nonlinear particularities are modeled. The output of the neural network hysteresis model compensates and controls the joint transmission error of the industrial robot. This method is different from precision manufacturing and processing. Instead, the joint execution accuracy is improved through the intelligent modeling compensation control method. The method has a small amount of calculation and is ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More