

Compensation control method for robot flexible joints based on lstm hysteresis model
A flexible joint, compensation control technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve problems such as the reduction of joint conversion accuracy, and achieve the effects of improving stability, compensating conversion errors, and improving conversion accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with specific examples.
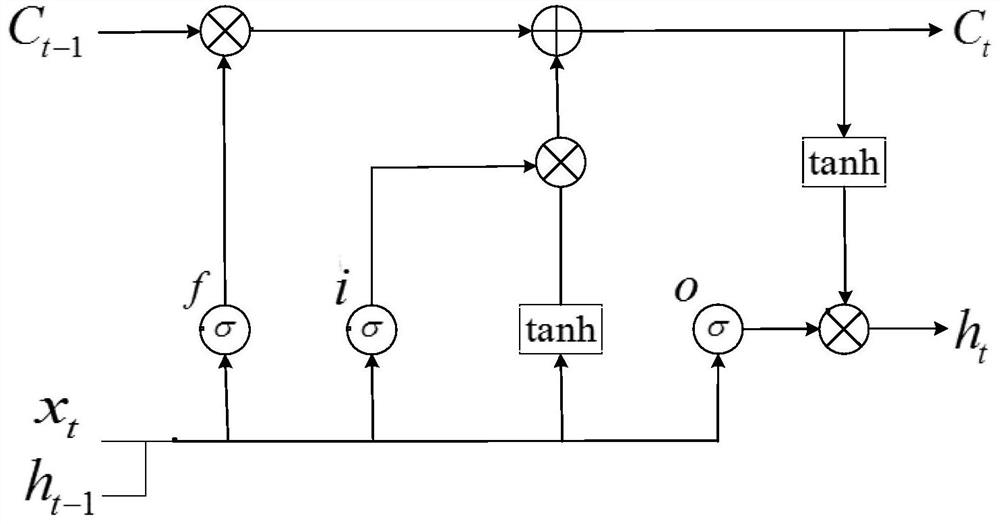
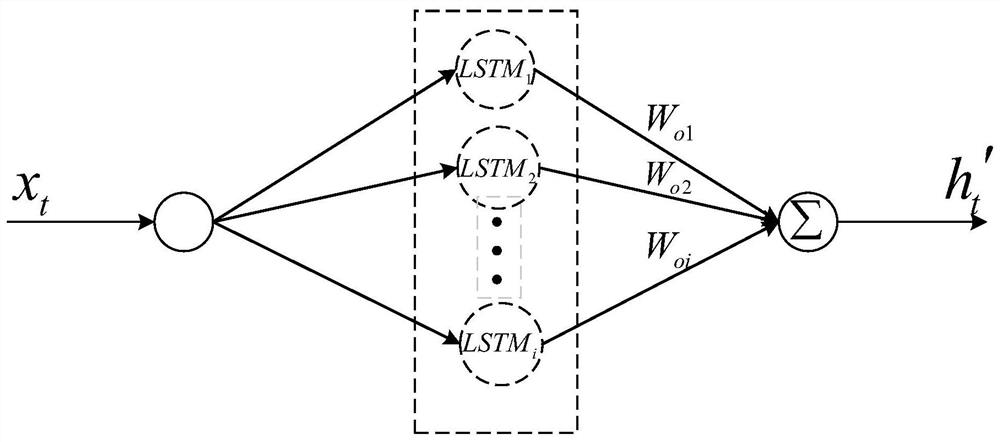
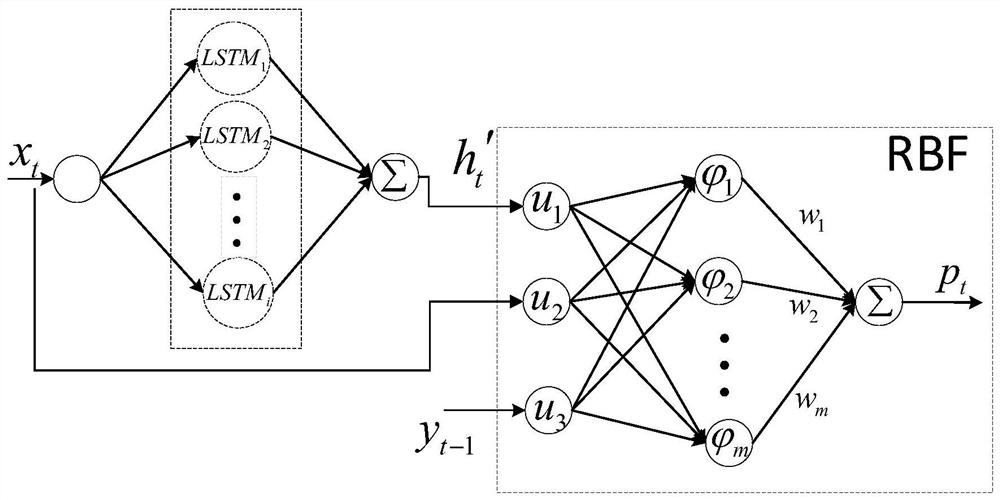
[0022] Considering the memory characteristics of the output of the flexible joints of the industrial robot and the historical input, the present invention adopts the long-short-term memory neural network (Long Short-Term Memory Model, LSTM) that can save and transmit information for a long time and has memory characteristics. The complex nonlinear hysteresis characteristics exhibited by flexible joints of robots are modeled. In order to further improve the modeling accuracy, the present invention proposes the hysteresis modeling of the flexible joints of industrial robots based on the improved LSTM, and designs a compensation control method for the conversion error of the flexible joints of industrial robots based on the model, so as to realize high-precision angular posit...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More