

Underwater outer limb and application thereof
A technology of limbs and outer side walls, applied in the directions of underwater ships, underwater operation equipment, special-purpose ships, etc., can solve the problems of reducing the propulsion efficiency of the propeller, poor hydrodynamic performance, and hindering the inflow of the propeller.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0052] Such as figure 1 As shown, the underwater extremity also includes a connection assembly, and the connection assembly includes a positioning rod 73 and a hoop member 76. The output end of the driver 75 is connected to one end of the positioning rod 73, and the other end of the positioning rod 73 is connected to the outer side wall of the propeller 74. Connection; the upper side of the hoop member 76 is provided with a through hole, and the positioning rod 73 is rotatably passed through the through hole.
[0053] In this embodiment, a driver 75 is used to drive the positioning rod 73 to rotate, thereby driving the propeller 74 to rotate, and the hoop member 76 plays an auxiliary fixing role. The through hole of the hoop member 76 can be provided with a bearing, and the positioning rod 73 is installed on the bearing. on the inner ring.
Embodiment 2
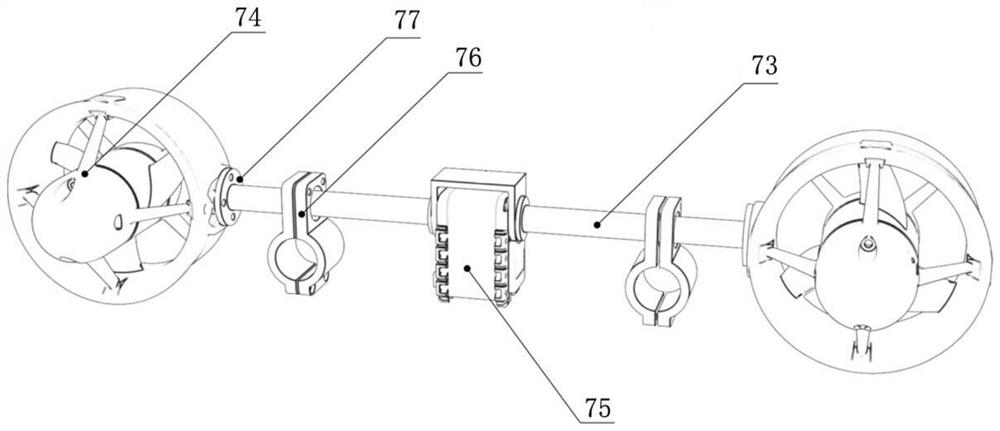
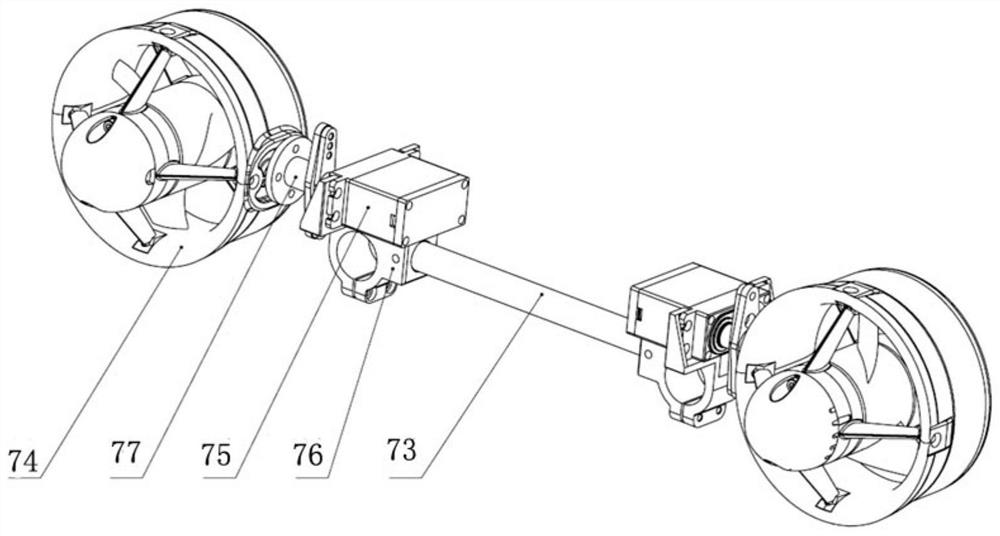
[0055] Such as figure 2 As shown, the difference from Embodiment 1 is that there are two drivers: the connecting assembly includes a positioning rod 73 and a hoop member 76, and the left and right ends of the positioning rod 73 are respectively connected with a hoop member 76, and one side of the hoop member 76 is A driver 75 is installed, and the output end of the driver 75 is connected to the outer side wall of the pusher 74 through the second connecting piece 77 . In a specific embodiment, the connecting member 77 adopts a connecting flange.
[0056] The hoop piece plays a fixing role and is used to fix the driver 75, and the positioning rod 73 is connected to the drivers 75 arranged symmetrically on the left and right sides. The left and right drivers 75 are respectively used to independently control the propulsion direction of the propeller 74. The positioning rod 73 is used to connect the two drivers 75 on the one hand, and keeps the axes of the output shafts of the dr...
Embodiment 3
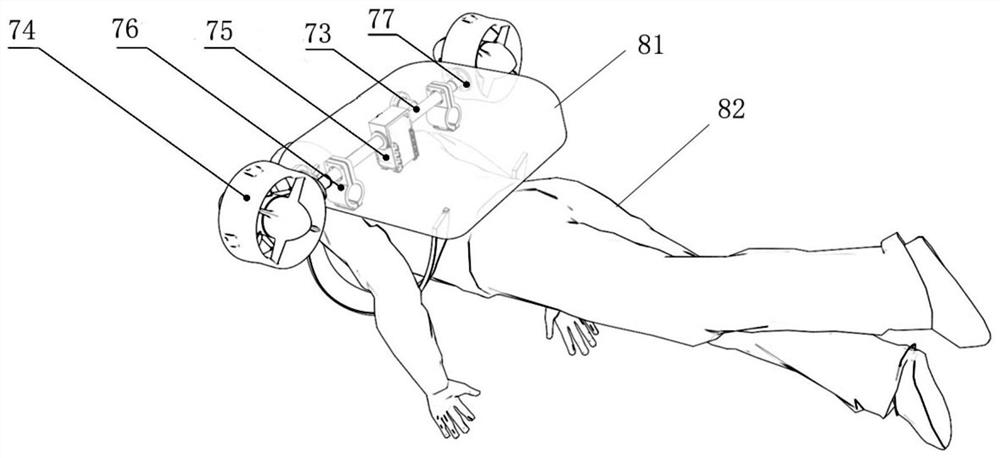
[0058] Such as image 3 As shown, the underwater extremities of the present invention can be applied to underwater driving backpacks:
[0059] The driver 75 is fixed in the underwater driving backpack 81, and the left and right sides of the underwater driving backpack 81 are respectively provided with propellers 74, and the output end of the driver 75 is connected with the outer side wall of the propeller 74.
[0060] After the diving operator 82 is equipped with the underwater driving backpack 81, he can adjust the propulsion angle of the propeller 75 through the driver 75 to perform multi-degree-of-freedom movements.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More