

Unmanned aerial vehicle follow-up taking-off and landing system
A technology for unmanned aerial vehicles and airborne systems, applied in the field of unmanned aerial vehicles, can solve the problems of poor accuracy, manual operation, long time consumption, etc., and achieve the effects of accurate positioning, precise take-off and landing, and low cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings.
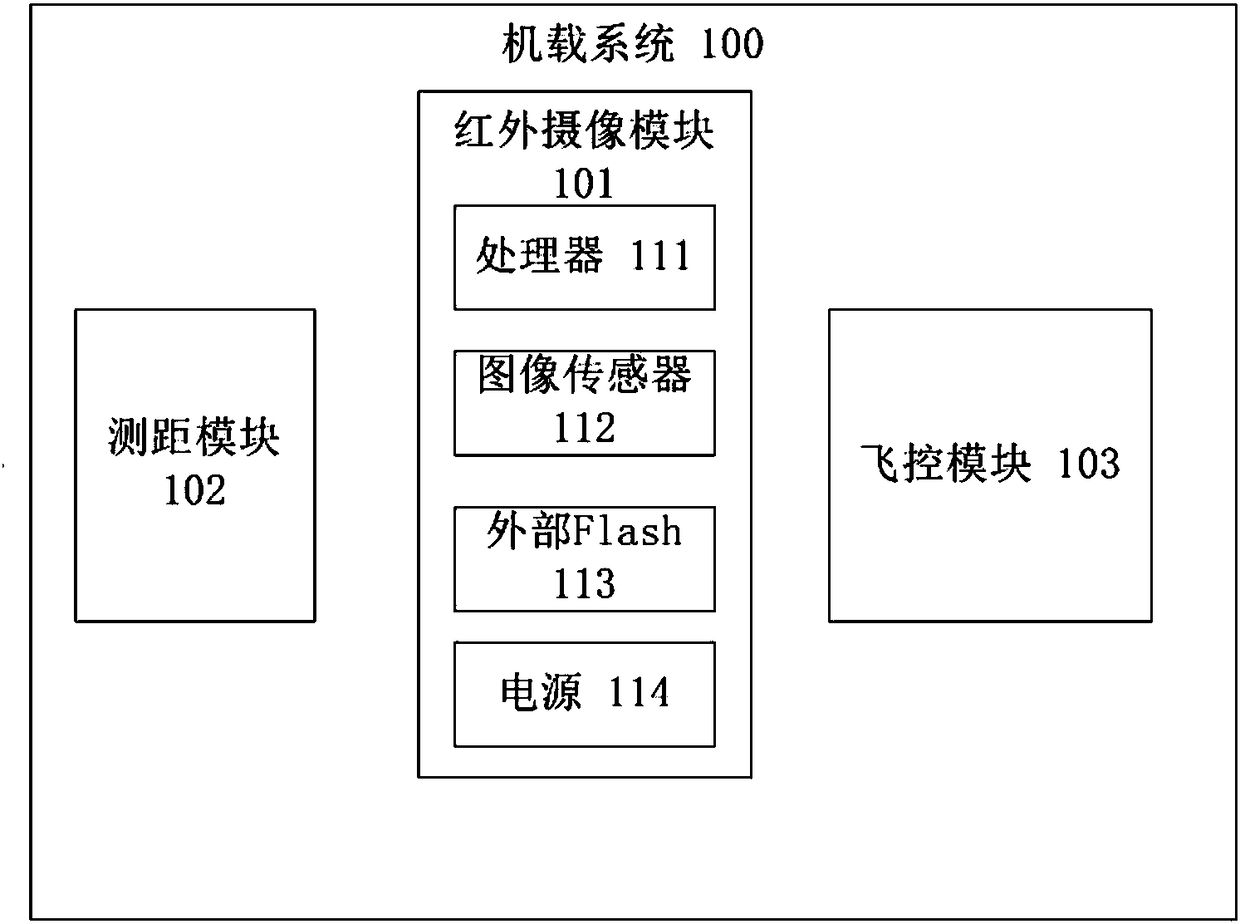
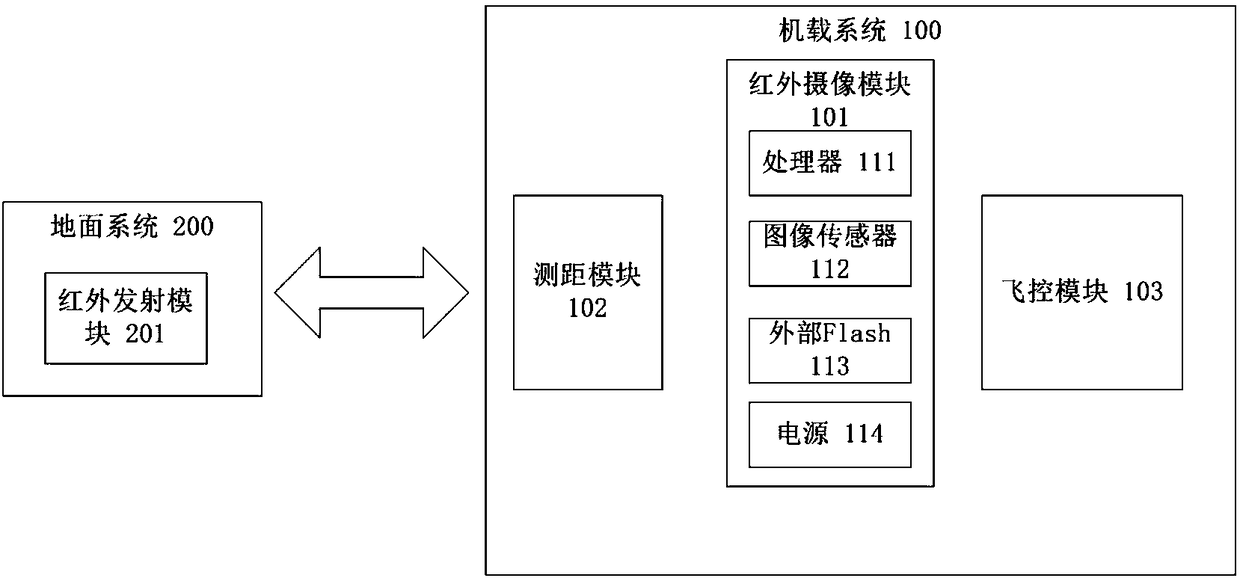
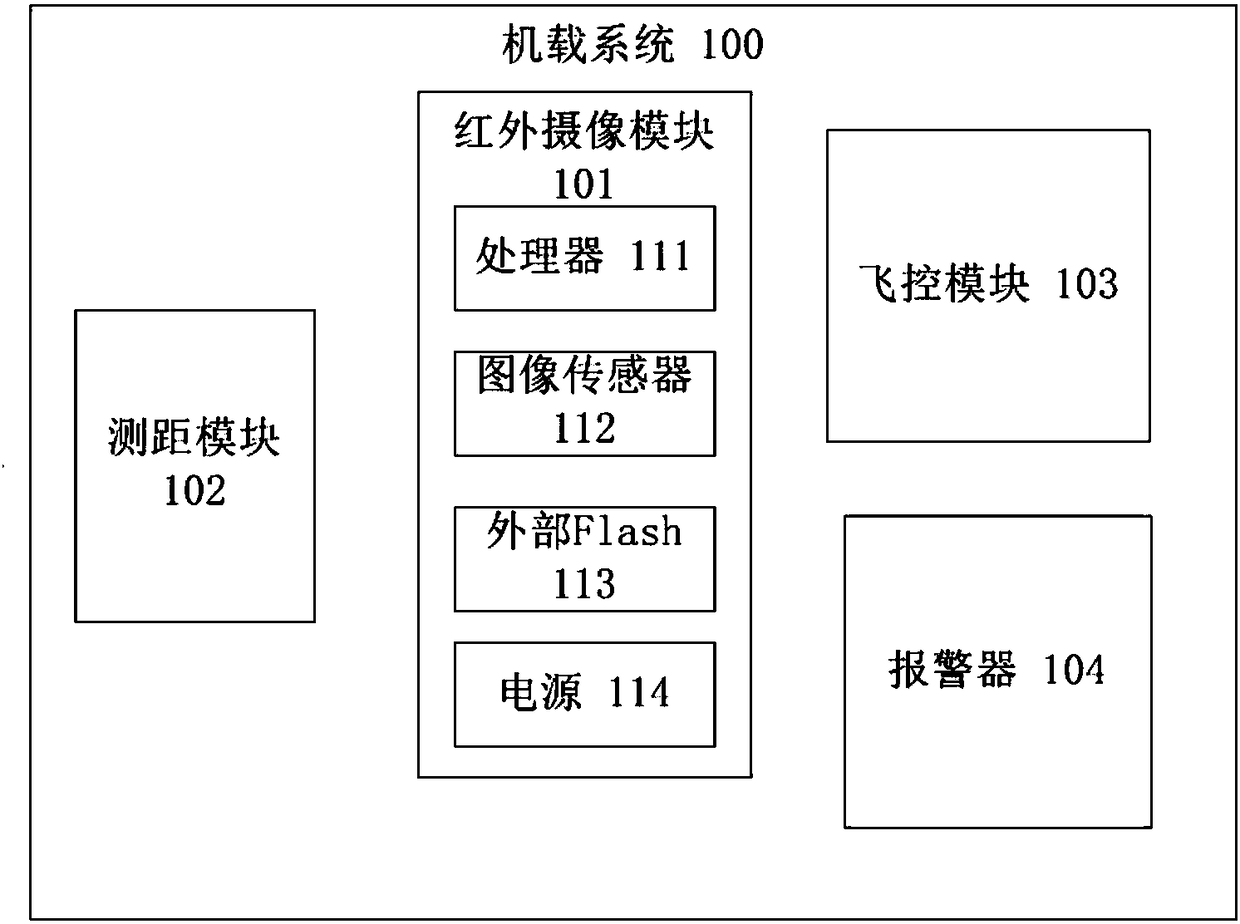
[0021] Such as figure 1 As shown, an unmanned aerial vehicle follow-up landing system disclosed in the present invention includes an airborne system 100 and a ground system 200. The ground system 200 includes an infrared emission module 201, and the infrared emission module 201 is used for taking off and landing The area transmits infrared signals; the airborne system 100 includes an infrared camera module 101, a ranging module 102 and a flight control module 103, and the ranging module 102 is used to measure the height of the drone from the ground, and the flight control module 103 For controlling the flight action of the unmanned aerial vehicle, the infrared camera module 101 and the ranging module 102 are all communicated with the flight control module 103; the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More