

Multi-robot collaborative perception service system, method and equipment for cloud environment
A multi-robot, collaborative sensing technology, applied in transmission systems, electrical components, etc., can solve problems such as one-sided practical solutions, poor application capabilities, and difficulty in meeting application requirements, and achieve adaptability to changes in the environment and needs, high collaboration capabilities, and The effect of ensuring survivability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0061] In order to make the embodiments, technical solutions and advantages of the present invention more obvious, the technical solutions of the present invention will be clearly and completely described below in conjunction with the accompanying drawings. Obviously, the described embodiments are part of the embodiments of the present invention, not all of them. Example. Those skilled in the art should understand that these embodiments are only used to explain the technical principles of the present invention, and are not intended to limit the protection scope of the present invention.
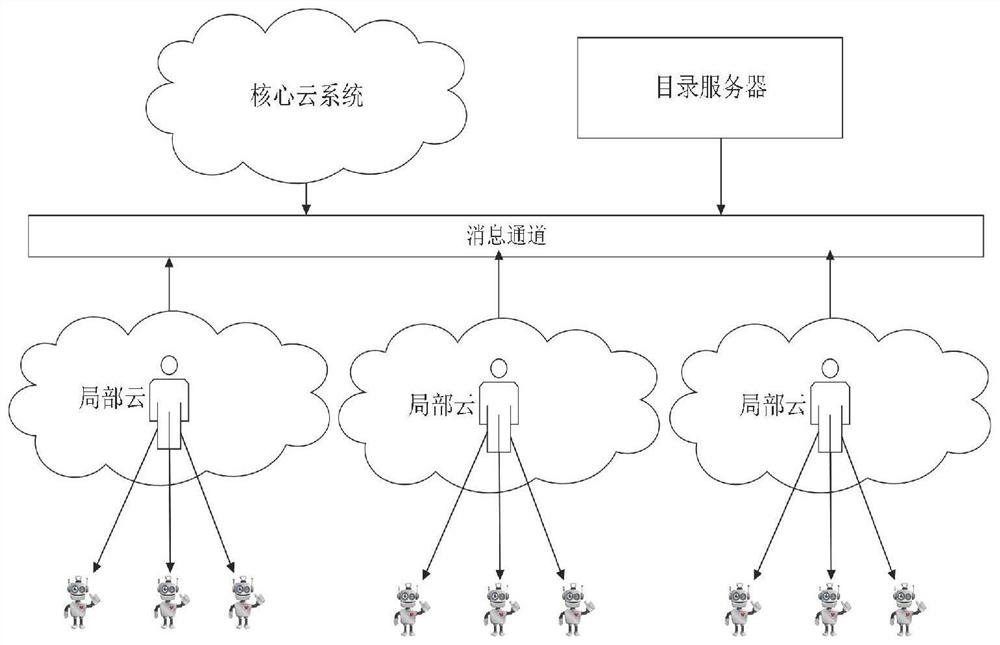
[0062] The first aspect of the present invention provides a cloud-oriented multi-robot cooperative perception service system, the system includes a core cloud system and a local cloud system, the core cloud system is configured to coordinate the local cloud system to complete task planning; the local cloud system includes a One or more partial clouds, one or more partial clouds communicate wi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More