

Vision-based multi-sensor fusion intelligent epidemic prevention robot and system
A multi-sensor fusion, robot technology, applied in the field of epidemic prevention robots, can solve the problems of lack of depth information, high requirements of robot environment, narrow application range, etc., to achieve the effect of efficient body temperature detection, wide search range, and improved accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments. This embodiment is carried out on the premise of the technical solution of the present invention, and detailed implementation methods and specific operation processes are given, but the protection scope of the present invention is not limited to the following embodiments.
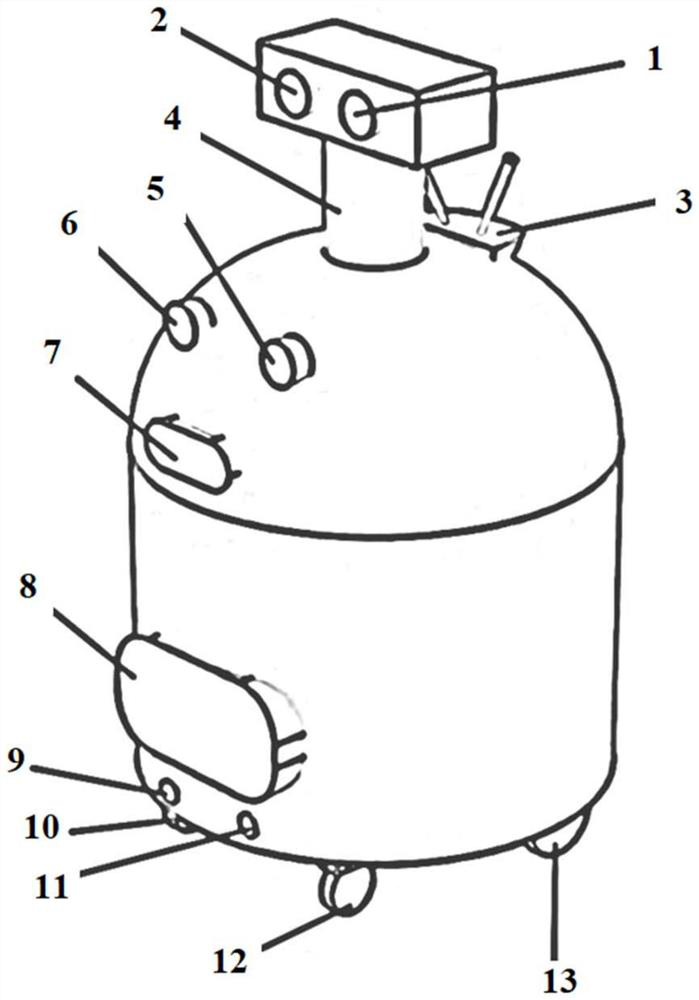
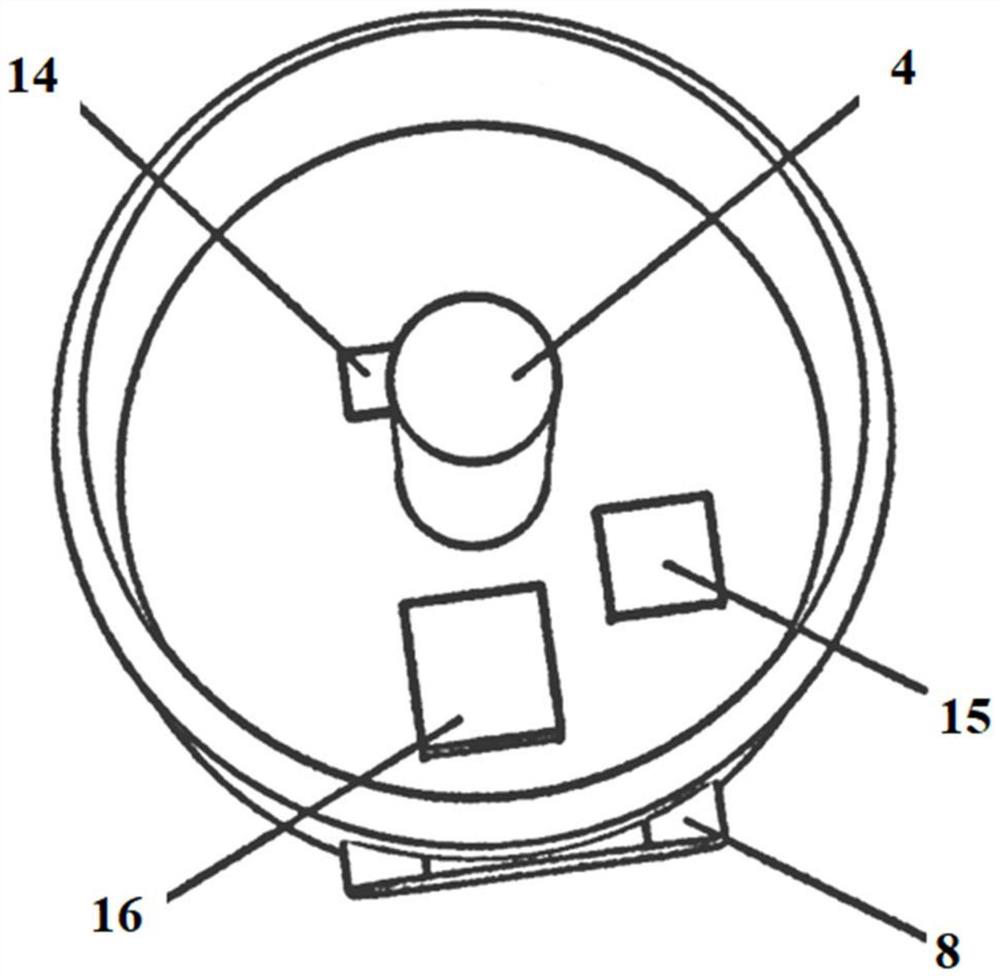
[0040] An intelligent epidemic prevention robot based on vision-based multi-sensor fusion, such as Figure 1 to Figure 3 , Figure 5 As shown, it includes a robot upper cover and a robot main body arranged up and down. The robot main body is provided with a rotating shaft 4 and a rotating motor 14 driving the rotating shaft 4. The center of the robot upper cover is provided with a through hole for the rotating shaft 4 to pass through. A sensor box is fixed at one end of the axis 4 passing through the through hole, and an infrared camera 2 and a high-definition camera 1 are ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More