A Method for Realizing Finite Time Control of Nonlinear Active Suspension System
What is AI technical title?
AI technical title is built by Patsnap AI team. It summarizes the technical point description of the patent document.
An active suspension and limited time technology, applied in the field of control, can solve the problems of large amount of calculation and affect the practical application of neural network, etc., and achieve the effect of compensating time lag
Active Publication Date: 2022-08-09
GUANGDONG UNIV OF TECH
View PDF0 Cites 0 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
[0003] In the existing literature on the nonlinearity of the finite-time stability of the system and the active suspension system, most of them use neural networks or adaptive neural networks to fit the nonlinear functions of the system. The amount of calculation is large, which seriously affects the practical application of neural networks
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
Embodiment 1
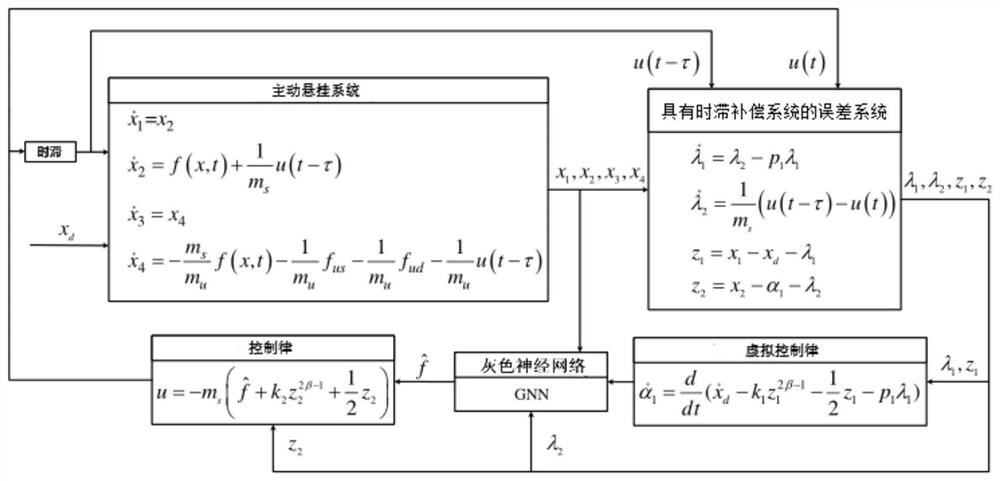
[0074] see Figure 1-Figure 3 , the method for realizing finite time control of nonlinear active suspension system of the present invention comprises the following steps:
[0075] (1) Establish the model equation of the active suspension system, analyze the space state of the active suspension system and the performance indicators that need to be improved, among which,
[0076] Performance metrics to be improved include sprung mass acceleration Suspension deflection z s -z u , tire deflection z u -z r ;
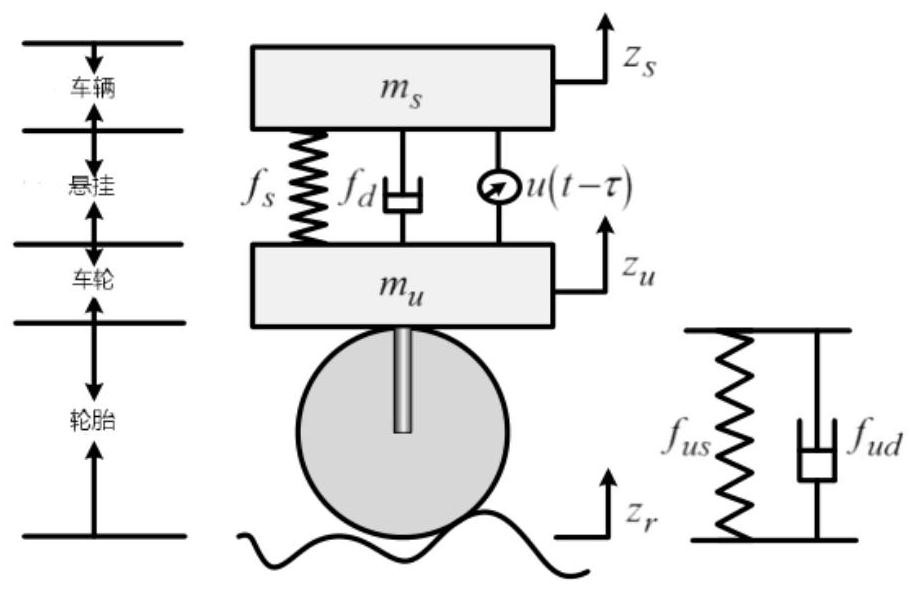
[0077] The model equation of the active suspension system is:
[0078]
[0079] where z s ,z u are the vertical displacements of the sprung and unsprung masses, respectively, z r is the input of the road, m s , m u are the sprung and unsprung masses, respectively, u is an actively controlled force generator with a constant time delay τ, f s , f d is the spring force and damping force function of the suspension component with nonlinear factors, f us , f ud T...
Embodiment 2
[0128] The following compares the passive suspension system (PSS) without a controller, the finite-time controller (FT) with a control law, and the goal controller with a controller law (GNNFT);
[0129] (1), sinusoidal road test
[0130] The parameter settings of the active suspension model can be found in the following table (Table 1);
[0131]
[0132] Set β = 19 / 20, k 1 =1, p 1 =60 / 4, k 2 =100, p 2 =6, and assumes the actuator has a constant actuator delay;
[0133] Road disturbances are:
[0134] z r =0.002sin(6πt);
[0135] The FT control law is:
[0136] u=m s (u n +u c );
[0137] where, u c is the external disturbance compensator, u n is the nominal controller satisfying:
[0138]
[0139] in,
[0140]
[0141] The GNNFT control law u is:
[0142]
[0143] When τ=30ms, it can be clearly seen that the acceleration spectrum of GNNFT (see Figure 4 ) has a peak near the resonant frequency with a maximum value, while FT has another peak at ot...
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
Abstract
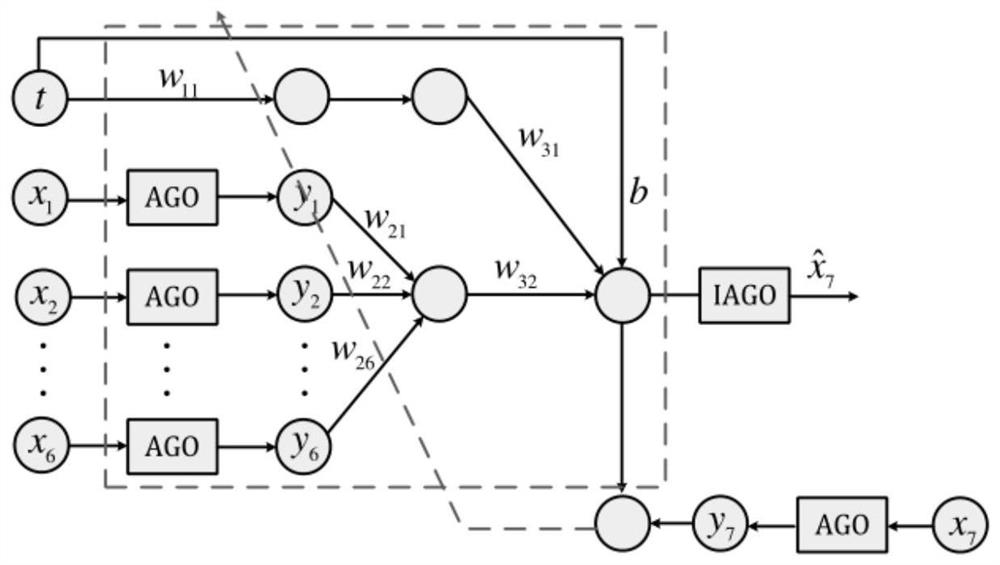
The invention discloses a method for realizing finite-time control of a nonlinear active suspension system. First, a model equation of the active suspension system is established to analyze the space state of the active suspension system and performance indexes that need to be improved; and then an error system with time delay compensation is established. , the influence of the time delay of the active suspension system is compensated by the auxiliary system; secondly, the Lyapunov function relationship is established through the error system, and the virtual control law a is obtained by using the inversion technique 1 , the control law u, to improve the corresponding performance indicators; the approximate nonlinear function of the compensated error system is obtained through the gray neural network training again; finally, after the correction of the control law u, a new and smaller time delay effect of the active suspension system is generated, The method of the present invention is repeatedly and continuously cycled in a limited time, thereby realizing stable control of the active suspension system in a limited time.
Description
technical field [0001] The invention relates to a control method, in particular to a method for realizing finite time control of a nonlinear active suspension system. Background technique [0002] For the control of active suspension systems, most of the existing controls are based on progressive stability. The disadvantage of asymptotic stability is that the time when the system reaches the stable state cannot be determined, and the time to reach the stable state is related to the rapidity of the system, so the control based on asymptotic stability is difficult to achieve the rapidity of the system. The control based on finite time stability can make the system reach a stable state within a specified time, so it is more likely to realize the rapidity of the system. [0003] In the existing literatures on the finite-time stability of the system and the nonlinearity of the active suspension system, most of them use the neural network or the adaptive neural network to fit the...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.



 Login to View More
Login to View More  Login to View More
Login to View More