

Control method applied to autonomous berthing of under-actuated double-propeller double-rudder ship
A control method and underactuated technology, applied in the direction of non-electric variable control, two-dimensional position/channel control, control/regulation system, etc., can solve the problem of independent berthing design of double propeller and double rudder ships without considering the impact, Issues such as rudder and propeller wrong vehicle coordinated control are not considered
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0077] Exemplary embodiments of the present disclosure will be described in more detail below with reference to the accompanying drawings. Although exemplary embodiments of the present disclosure are shown in the drawings, it should be understood that the present disclosure may be embodied in various forms and should not be limited by the embodiments set forth herein. Rather, these embodiments are provided for more thorough understanding of the present disclosure and to fully convey the scope of the present disclosure to those skilled in the art.
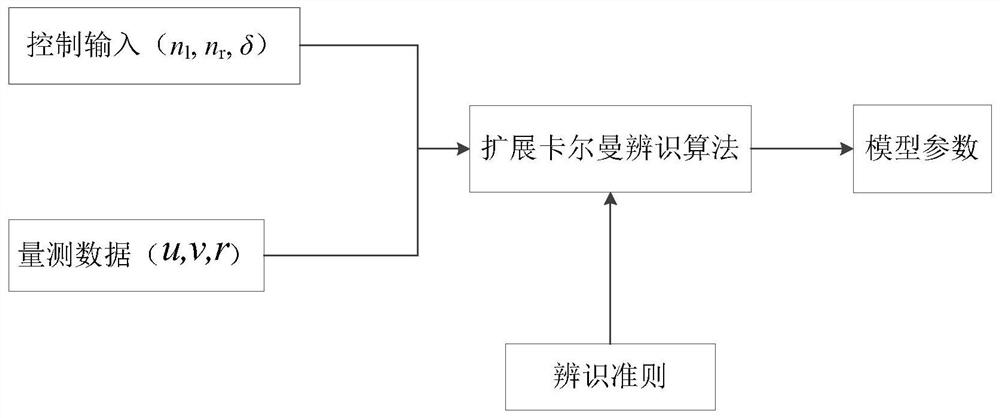
[0078] The control method applied to the autonomous berthing of an underactuated double propeller and double rudder ship provided by the present invention includes three parts as a whole: a ship motion model parameter identification step, a model prediction control step and a PID control step.
[0079] Among them, the ship motion model parameter identification step: obtain the ship motion history data collected by the ship's own mot...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More