

Full-mode self-adaptive control method for composite helicopter
A technology of self-adaptive control and mode control, applied in the direction of self-adaptive control, general control system, control/regulation system, etc., can solve problems such as the inability to guarantee robustness, and improve the command tracking ability, anti-interference ability, and convergence. Good, enhance the effect of stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0065] In order to facilitate the understanding of those skilled in the art, the present invention is further described below with reference to the accompanying drawings.
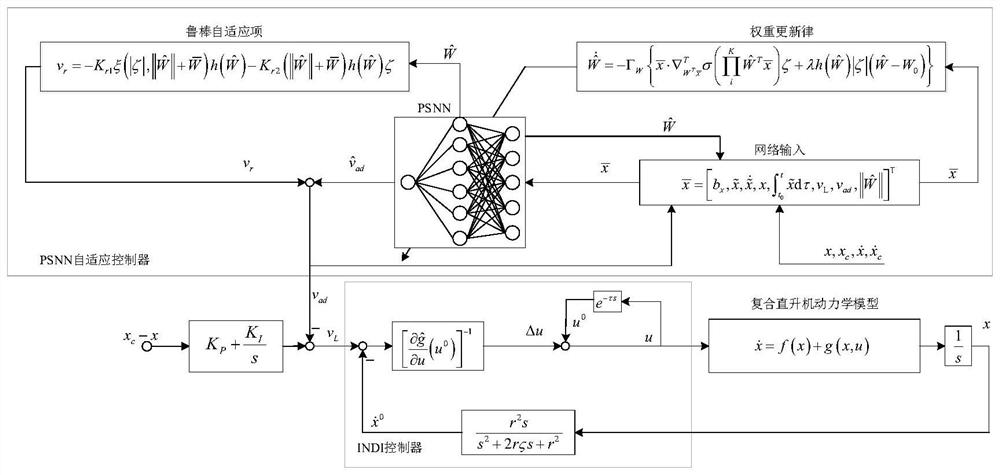
[0066] like figure 1 The shown structural block diagram of a compound helicopter full-mode adaptive control method includes the following four steps.
[0067] Step 1. Establish a compound helicopter non-affine nonlinear dynamic system, which is represented by two subsystems:
[0068]
[0069]
[0070] In formula (1) and formula (2), x 1 is the state vector of the velocity loop of the non-affine nonlinear dynamical system, x 2 is the state vector of the attitude loop of the non-affine nonlinear dynamic system, x 1 =[u,v,w], u,v,w represent the three velocity components under the body coordinate axis system, x 2 =[p,q,r], p,q,r represent the three angular velocity components under the body coordinate axis system, represents the state vector x of a non-affine nonlinear dynamical system 1 ,x 2 the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More