A non-incremental model-free adaptive heading control method for ships
A model-free self-adaptive, control method technology, applied in non-electric variable control, control/regulation systems, two-dimensional position/channel control, etc., can solve problems such as reducing system stability, and increase the flexibility of adjustment , the effect of increasing the ability of the model to mutate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
specific Embodiment approach 1
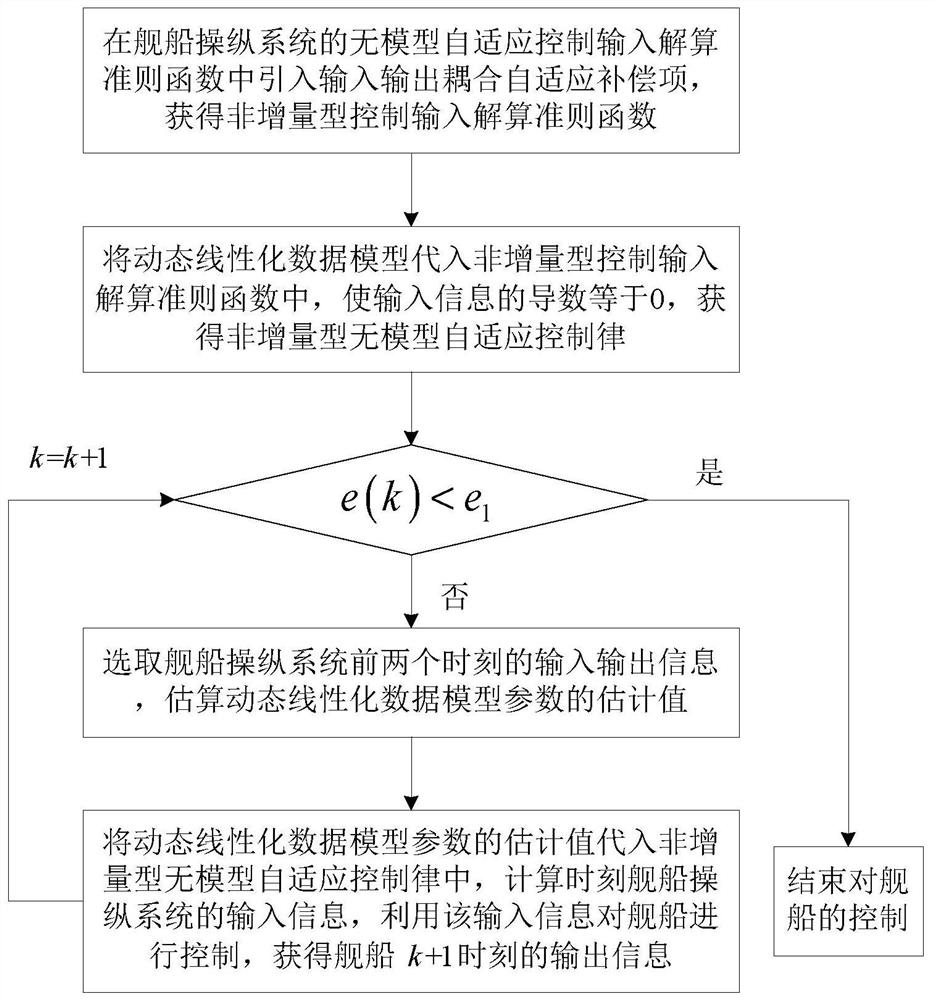
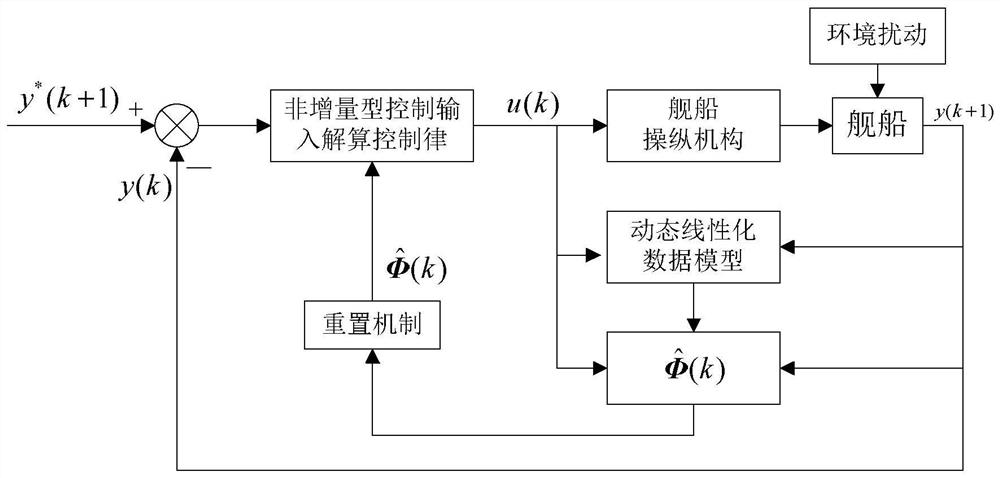
[0039] Specific implementation mode one: refer to figure 1 and figure 2 This embodiment is described in detail. A non-incremental model-free adaptive heading control method for a ship described in this embodiment includes the following steps:
[0040] Step 1: Introduce the input-output coupling adaptive compensation item into the model-free adaptive control input solution criterion function of the ship control system to obtain the non-incremental control input solution criterion function.
[0041] Specifically, the non-incremental control input solution criterion function is denoted as J[·], and the input of this function is u(k), k r Δy(k+1)u(k-1) is the input-output coupling adaptive compensation item, then:
[0042] J[u(k)]=[y * (k+1)-y(k+1)] 2 +λ[u(k)-u(k-1)] 2 +k r Δy(k+1) u(k-1),
[0043] Among them, u(k) and y(k) are the rudder angle and heading angle at time k, respectively, and are used as the input information and output information of the ship control system, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com