Optimal control method for bounce motion on surface of small celestial body
An optimal control and small celestial body technology, applied in the field of deep space exploration, can solve problems such as low efficiency and large amount of calculation, and achieve the effects of ensuring accuracy, improving efficiency, and improving solution efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
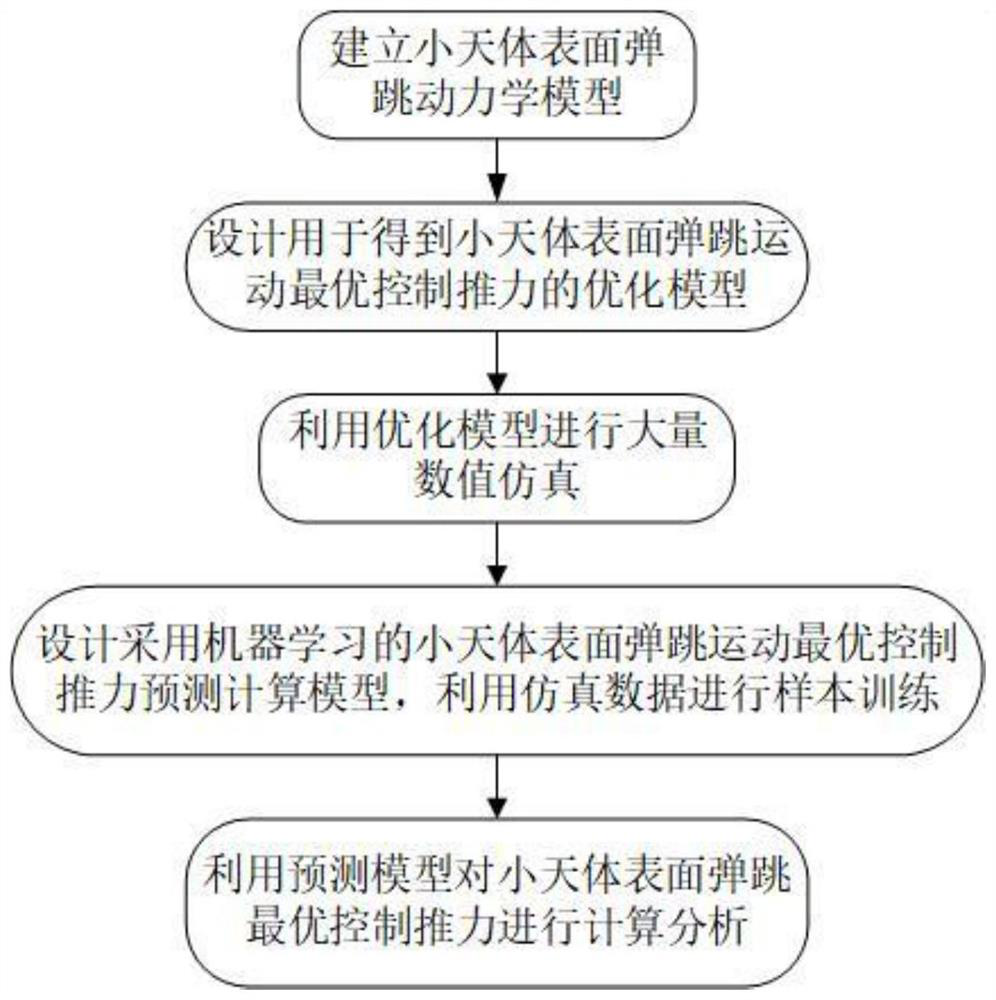
Method used
Image

Examples
Embodiment 1
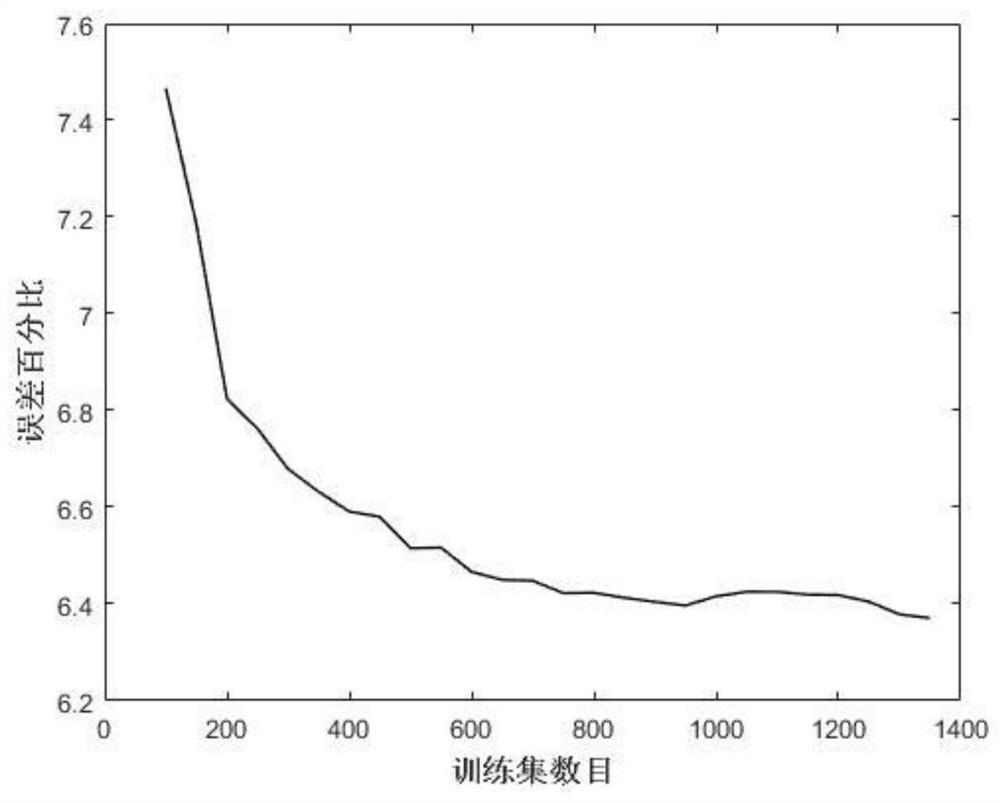
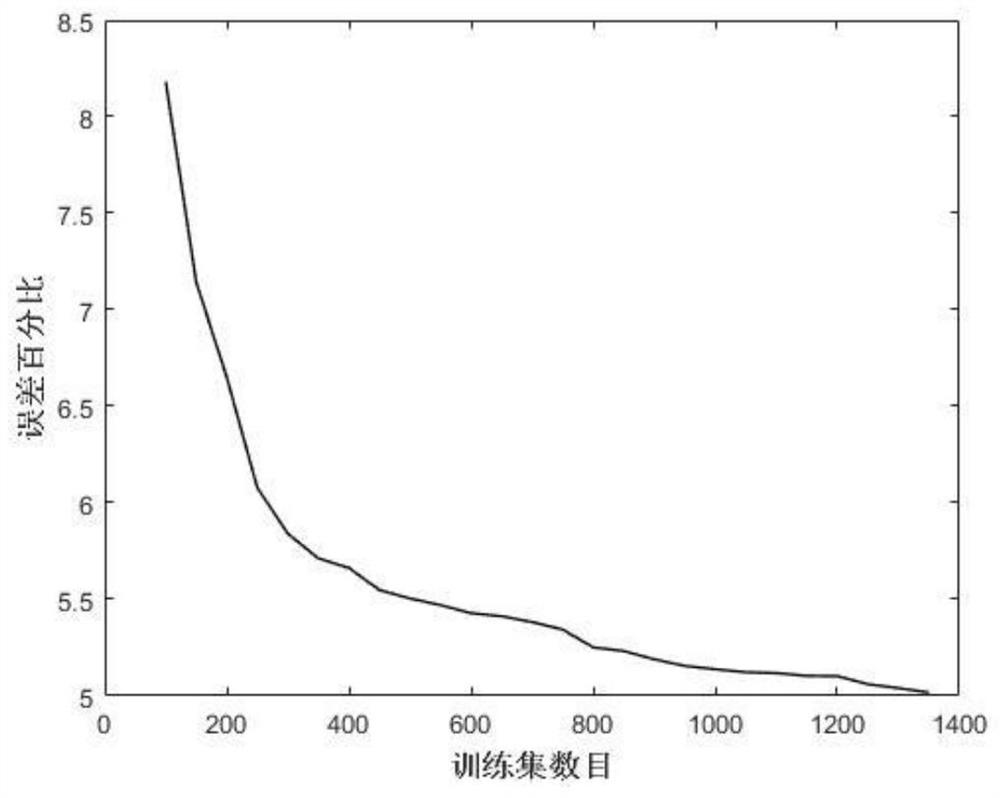
[0184] In order to test the accuracy of the model, the calculation error analysis of the prediction calculation model is carried out. 3000 sets of data points were randomly selected, 800 sets of data were selected from the data set obtained by the optimization algorithm as the test set, and 200, 400, 800, 1000, and 1200 sets of data were selected from the remaining data as the training set to train the model. The relative error of the initial thrust prediction varies with the size of the training data as follows: figure 2 , the relative error of terminal thrust prediction varies with the size of training data as shown in image 3 , the error distribution diagram of the test sample under different training samples is obtained as Figure 4 .
[0185] Depend on figure 2 and image 3 It can be seen that when the training data reaches about 800 groups, with the increase of training data, the performance of the prediction model does not improve much. The average relative error...
Embodiment 2
[0188] Step one to four are the same as embodiment 1
[0189] It also includes step 5: using the predicted calculation results of step 4 to calculate the optimal trajectory of the bouncing movement of the surface of the small celestial body, and then solve the related engineering problems of the detection of the surface of the small celestial body;
[0190] In order to more fully test the performance of the method proposed by the present invention, the calculation time for obtaining the optimal trajectory is analyzed. The control thrust is applied to the beginning and end moments, so the model is trained twice, and the time used for prediction is shown in Table 1. And the time used by the convex optimization method is compared with the time used by the fast prediction method proposed by the present invention, and the results are shown in Table 2.
[0191] Table 1 Time taken to solve the optimal thrust
[0192]
[0193] Table 2 Comparison of the time used to obtain the opt...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com