

Hip joint exoskeleton control method and device
A control method and exoskeleton technology, applied in the field of exoskeletons, can solve the problems that the control strategy cannot meet a variety of lower limb activity tasks, the assisting experience is blunt, and the shape of the hip joint exoskeleton product cannot be adjusted.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0068] In order to make the purpose, features and advantages of the present application more obvious and understandable, the present application will be further described in detail below in conjunction with the accompanying drawings and specific implementation methods. Apparently, the described embodiments are some of the embodiments of the present application, but not all of them. Based on the embodiments in this application, all other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of this application.
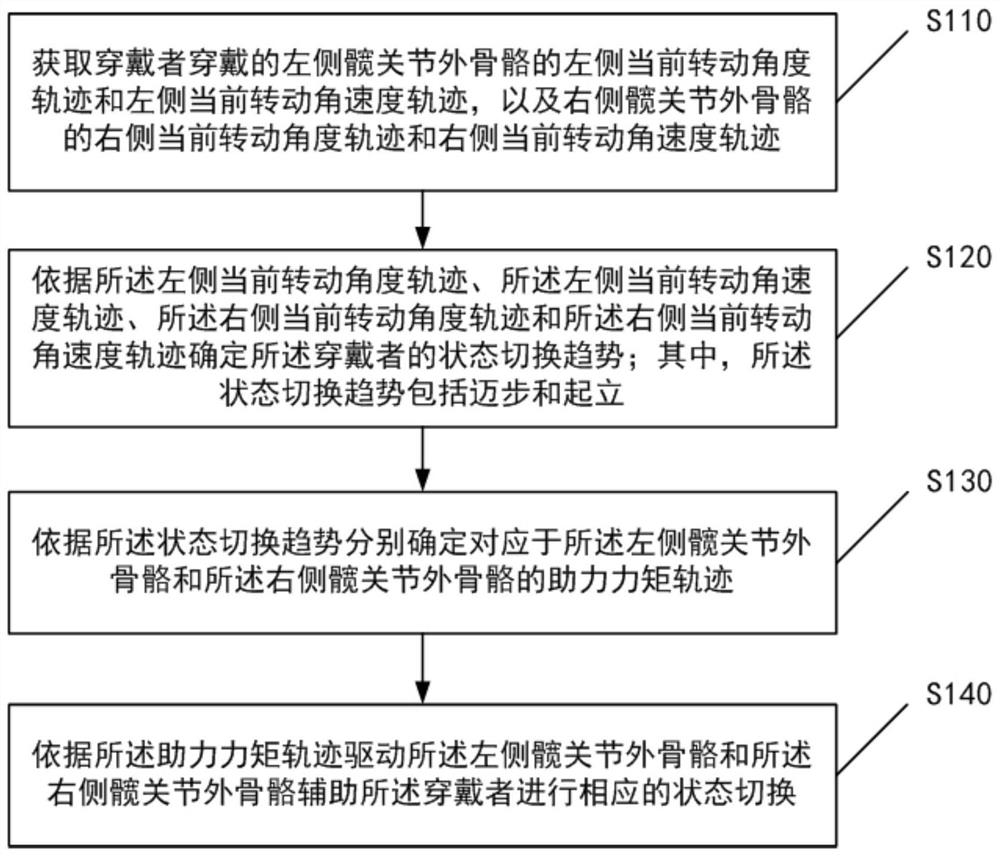
[0069] refer to figure 1 , which shows a method for controlling a hip exoskeleton provided by an embodiment of the present application, specifically including:
[0070] S110. Obtain the left current rotation angle trajectory and the left current rotation angular velocity trajectory of the left hip exoskeleton worn by the wearer, and the right current rotation angle trajectory and right current rotation a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More