

Foreground point cloud and background point cloud fusion method and system, and equipment
A fusion method and background point technology, applied in image data processing, instruments, computing, etc., can solve the problems of data set generation and labeling efficiency, insufficient diversity of data samples, unreasonable fusion, etc., to improve generalization ability, reduce The effect of manual duplication of work and solving the lack of diversity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0063] The application will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain related inventions, not to limit the invention. It should also be noted that, for the convenience of description, only the parts related to the related invention are shown in the drawings.
[0064] It should be noted that, in the case of no conflict, the embodiments in the present application and the features in the embodiments can be combined with each other. The present application will be described in detail below with reference to the accompanying drawings and embodiments.
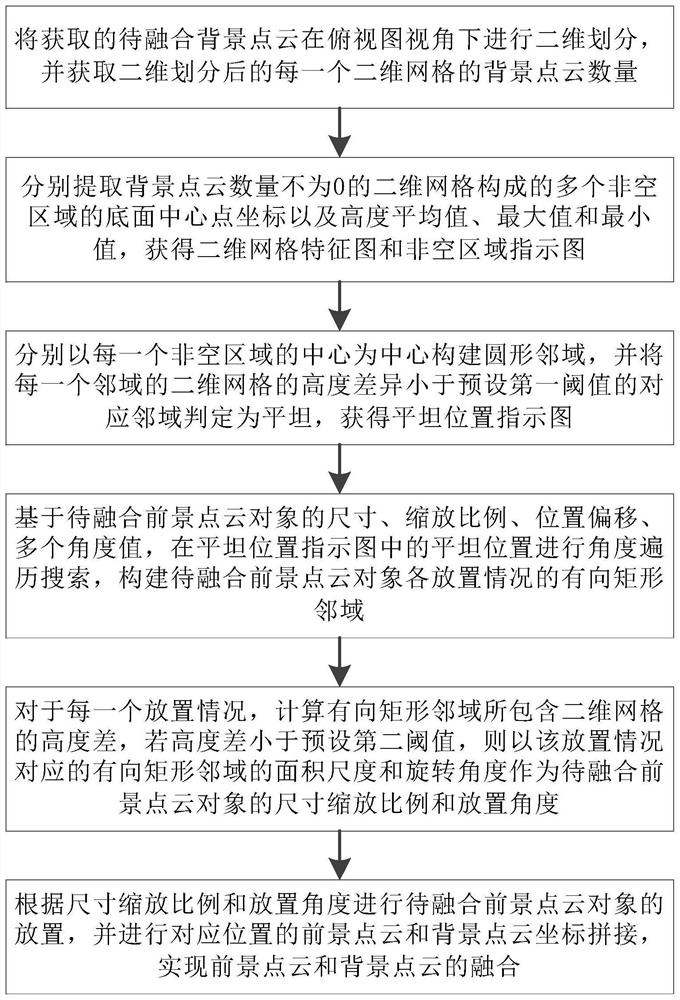
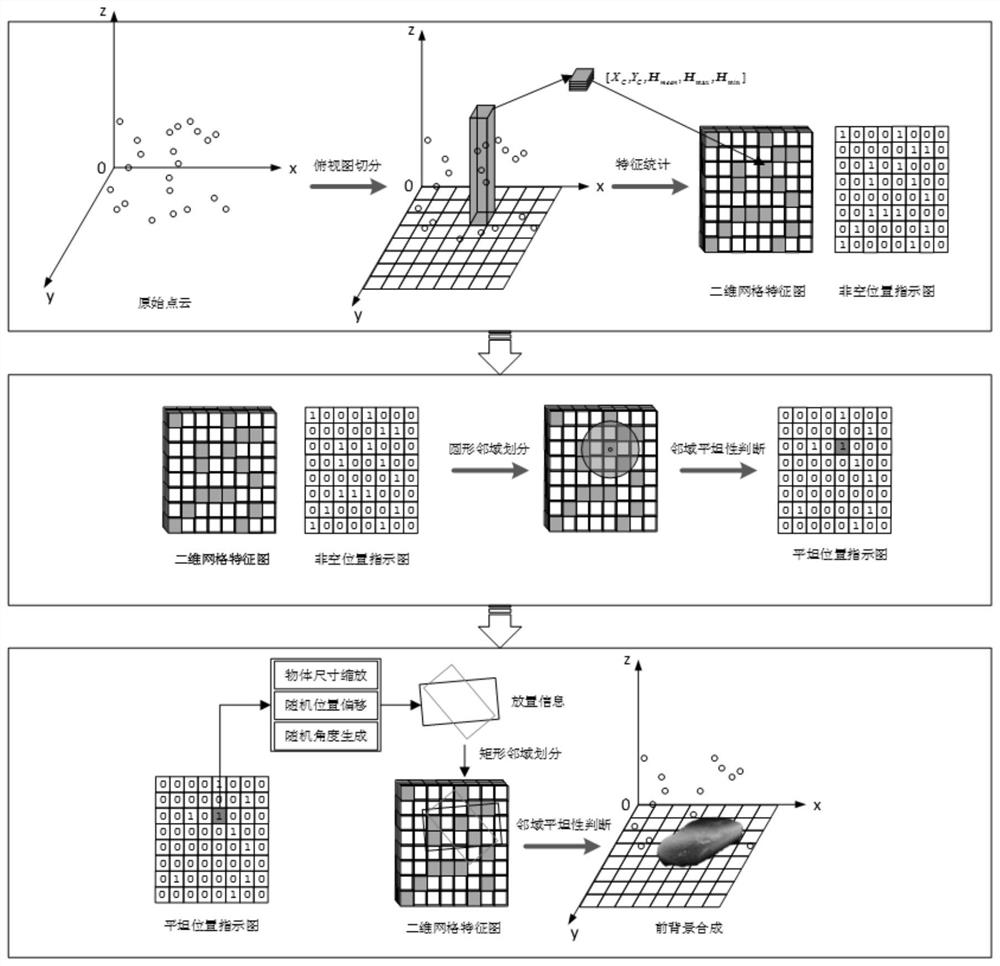
[0065] The invention provides a fusion method of the foreground point cloud and the background point cloud. Firstly, the whole background point cloud is two-dimensionally divided under the perspective of the top view, a two-dimensional grid is established, and the number of point clo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More