

Speed curve planning method for continuous processing path
A speed curve and processing path technology, applied in the direction of instruments, digital control, control/regulation systems, etc., can solve the problems of unsatisfactory speed backtracking speed and unstable speed curve, etc., achieve good processing quality, stable speed curve, and improve efficiency Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach
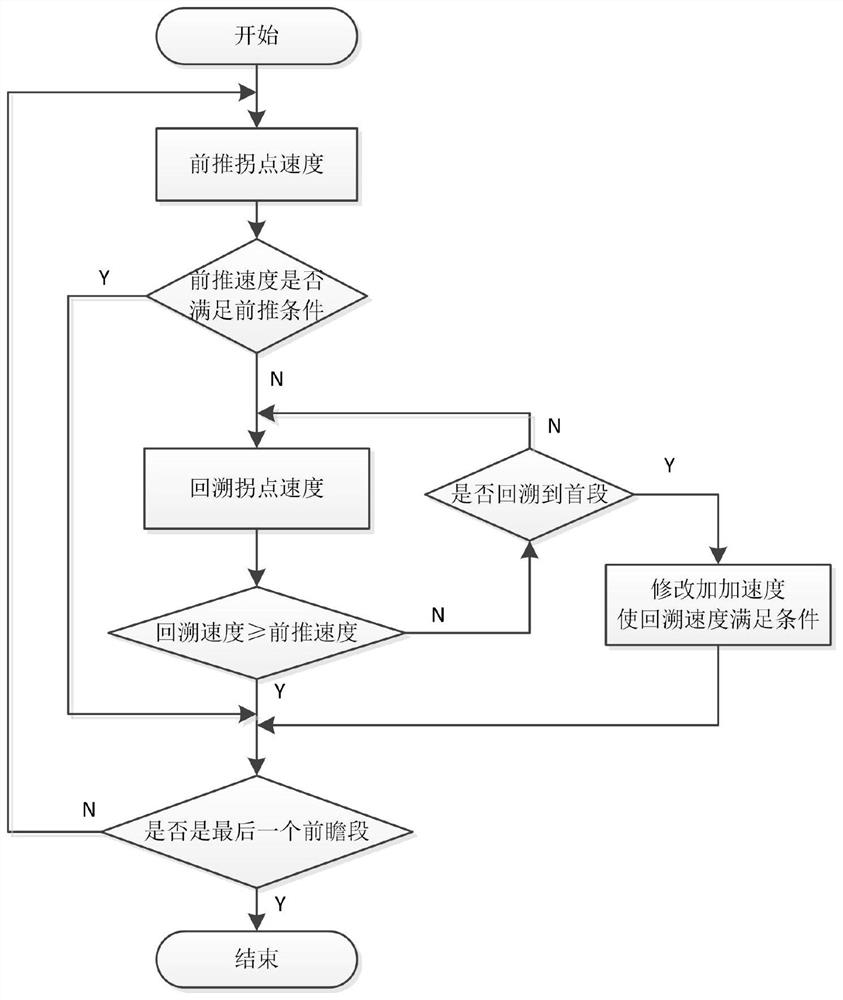
[0037] Step 1: For the divided forward-looking segment, perform forward-looking in sub-sections, and then recursively push forward the small-section curve first to obtain the forward-moving speed, and ensure that the forward-moving speed is less than or equal to the speed limit of the inflection point;
[0038] Step 2: Backtracking is performed on the points that do not meet the forward-forwarding conditions to obtain the backtracking speed. When the backtracking speed is greater than the forward-forwarding speed, the requirements are met, and this small section of forward-looking ends;
[0039] Step 3: If the backtracking speed is less than the forward speed, the backtracking speed does not meet the requirements, and continue to backtrack until the backtracking speed is greater than the forward speed;
[0040]Step 4: If the curve of the first section backtracking to the small section still does not meet the requirements, it is necessary to modify the jerk of the first section ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More