

A formation method for unmanned vehicles on highways based on multi-agent reinforcement learning
An unmanned vehicle and reinforcement learning technology, applied in the field of intelligent vehicles, can solve the problems of poor stability of the formation system, limited vehicle perception, and high stability requirements, to enhance stability and fault tolerance, increase control constraints, and increase training difficulty. big effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
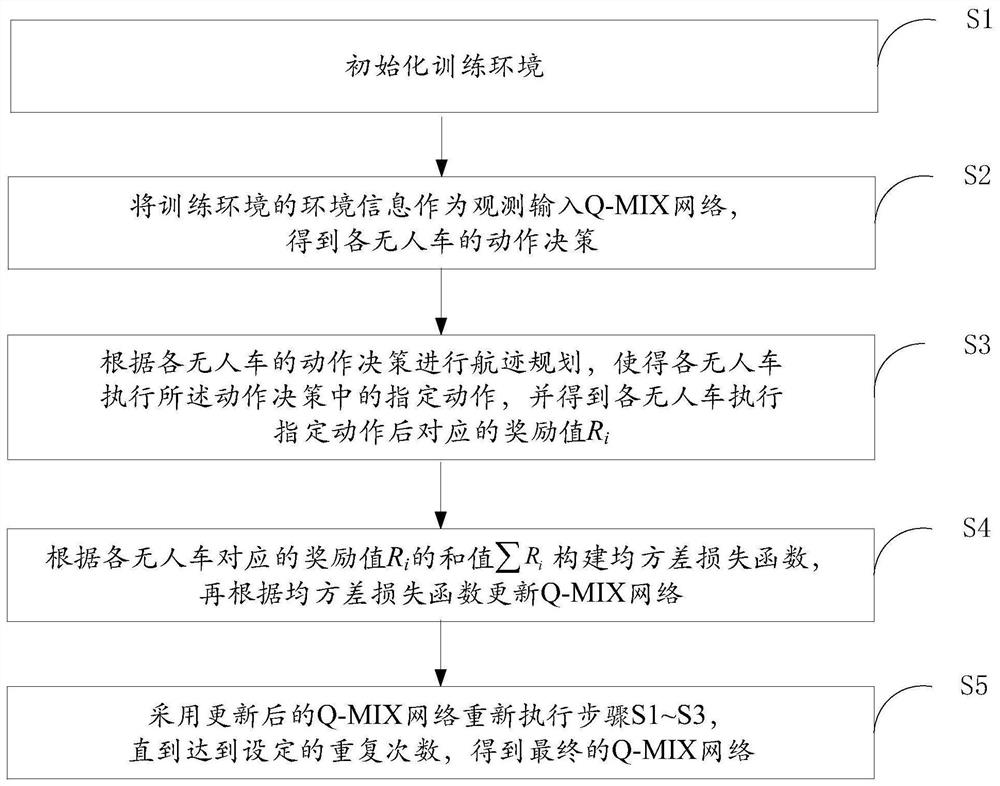
[0051] S1: Initialize the training environment.
[0063]
[0064]
[0065]
[0070]
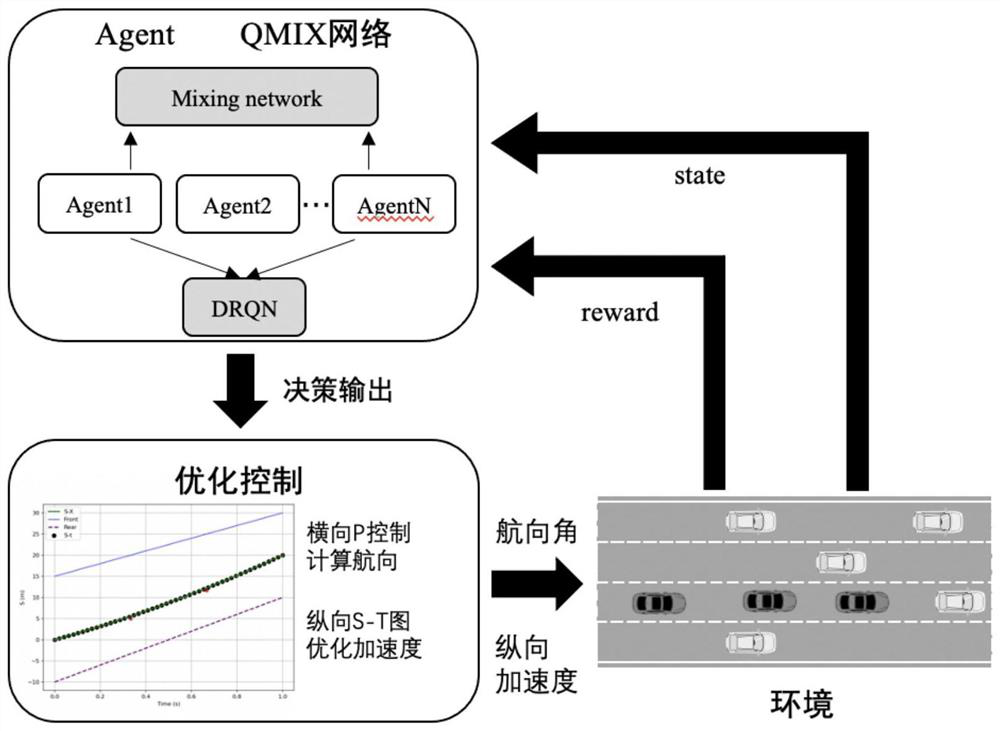
[0071] where μ∈{S, T} means that the curve is divided into two dimensions, S and T, S means displacement, T means sampling time, and f(t) means
[0072] For lateral control, a proportional controller model was employed to convert the calculated lateral velocity to a heading reference.
[0076] Further, assuming that the network parameter of the Q-MIX network is θ, which represents the weight and bias of the network, the final loss
[0077]
[0080]
[0081] wherein, represents the Target-Q target network.
Embodiment 2
[0084] This implementation case provides a high-speed road unmanned vehicle formation decision based on multi-agent reinforcement learning
[0086] In step S2, the local observations of each vehicle are taken as input and input into the DRQN network. Build two structural phases
[0087] Set up a "memory playback unit" and randomly select the experience in it for training, which interrupts the training sample
[0089]
[0090]
[0092]
[0094] Equation constraints, including position and velocity constraints at the initial time, and position constraints at the termination time. on the S dimension
[0095] P
[0096] P
[0097] n·(P
[0098] n·(P
[0099] Wherein the subscript 0 represents the starting point, and 3 represents the end point.
[0100] Inequality constraints, including position constraints, velocity constraints and acceleration constraints of control points. Inequality constraints are optimizations
[0101] S
[0102] P
[0103]
[0104]
[0106] Step S4, execute ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More