

Multi-unmanned aerial vehicle system formation tracking control method based on dynamic event triggering
An event-triggered, multi-UAV technology, applied in the control field, can solve the problem of not considering the leader's time-varying formation consistency, and achieve the effects of reducing event triggering, saving energy, and improving communication efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
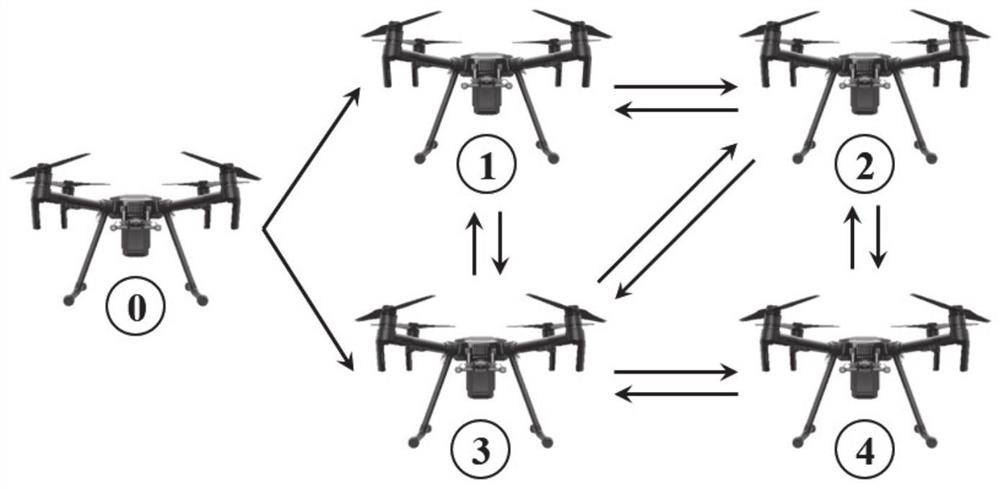
[0048] In a typical implementation of the present application, such as figure 1 As shown, taking the UAVs system composed of five UAVs as an example, the UAV numbered 0 can exist as a virtual UAV as the leader in the UAVs system, and the other UAVs numbered 1-4 are followers. The position information of the UAV numbered 0 can be transmitted to the UAVs numbered 1 and 3, and the position status of the UAVs numbered 1-4 can be transmitted to each other. A UAV formation control method based on dynamic event triggering of the present invention mainly includes parameter initialization, state estimation during no trigger period, calculation of event trigger function and dynamic threshold, judging whether the trigger condition is reached, communication and state update according to the trigger situation.
[0049] This embodiment discloses a UAVs system formation control method based on dynamic event triggering, and the specific steps include:
[0050] Step 1: Mathematically model th...
Embodiment 2
[0104] The purpose of this embodiment is to provide a computing device, including a memory, a processor, and a computer program stored in the memory and operable on the processor, and the processor implements the steps of the above method when executing the program.
Embodiment 3
[0106] The purpose of this embodiment is to provide a computer-readable storage medium.
[0107] A computer-readable storage medium, on which a computer program is stored, and when the program is executed by a processor, the steps of the above-mentioned method are executed.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More