Control method of four-axis mechanical arm for grabbing explosives
A technology for robotic arms and explosives is applied in the control field of four-axis robotic arms, which can solve the problems of complex and unintuitive operation, and achieve the effect of reducing the difficulty of operation, simplicity of automation, and reduction of computing time.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The present invention will be described in detail below with reference to the accompanying drawings and examples.
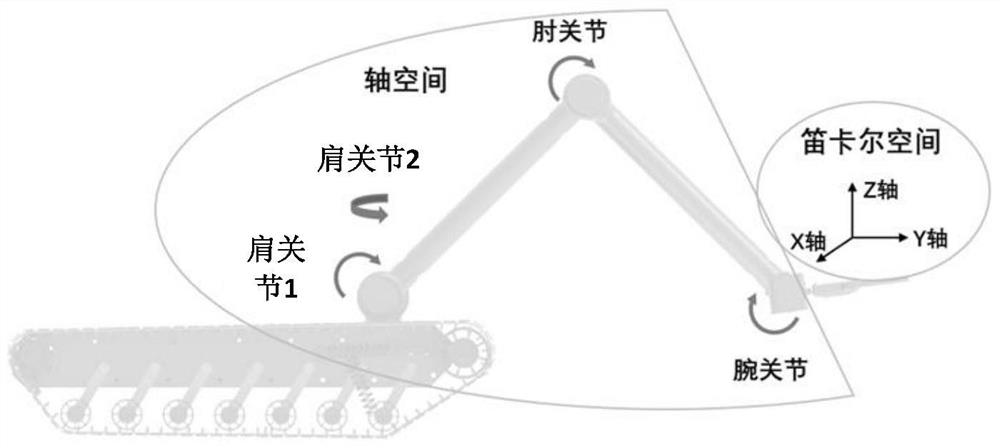
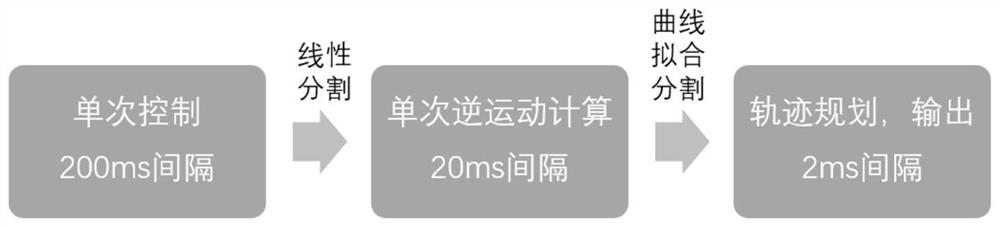
[0035] The invention provides a method for controlling a four-axis robotic arm for grabbing explosives. The four-axis robotic arm includes four joints, which are respectively the first shoulder joint, the second shoulder joint, the elbow joints and wrist joints, wherein the first shoulder joint is connected to the platform, the flow of the control method is as follows Figure 6 shown, including the following steps:
[0036] Step 1. According to the initial position P of the end of the robot arm 1 and the target point P 2 , for line segment P 1 P 2 Carry out the average division of the position points, the divided position points and P 1 ,P 2 Makes up the end trajectory of the robotic arm.
[0037] Step 2. Obtain the coordinates (px py pz) of the end position of the robotic arm in sequence, and use the inverse motion calculation process to calculate ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More