

Unmanned aerial vehicle autonomous flight training method based on reinforcement learning and transfer learning
A technology of reinforcement learning and transfer learning, applied in the direction of integrated learning, adaptive control, instruments, etc., can solve the problems that the flight strategy cannot be applied and cannot deal with complex and changeable environments, so as to reduce adverse effects and make the algorithm more robust sticky effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0024] Below in conjunction with specific embodiment, further illustrate the present invention, should be understood that these embodiments are only used to illustrate the present invention and are not intended to limit the scope of the present invention, after having read the present invention, those skilled in the art will understand various equivalent forms of the present invention All modifications fall within the scope defined by the appended claims of the present application.
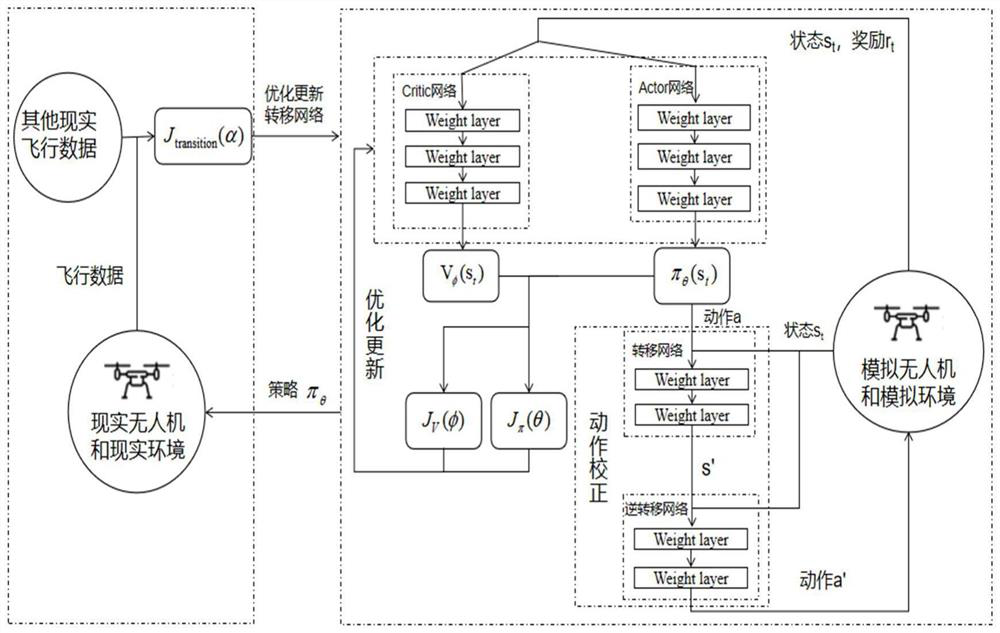
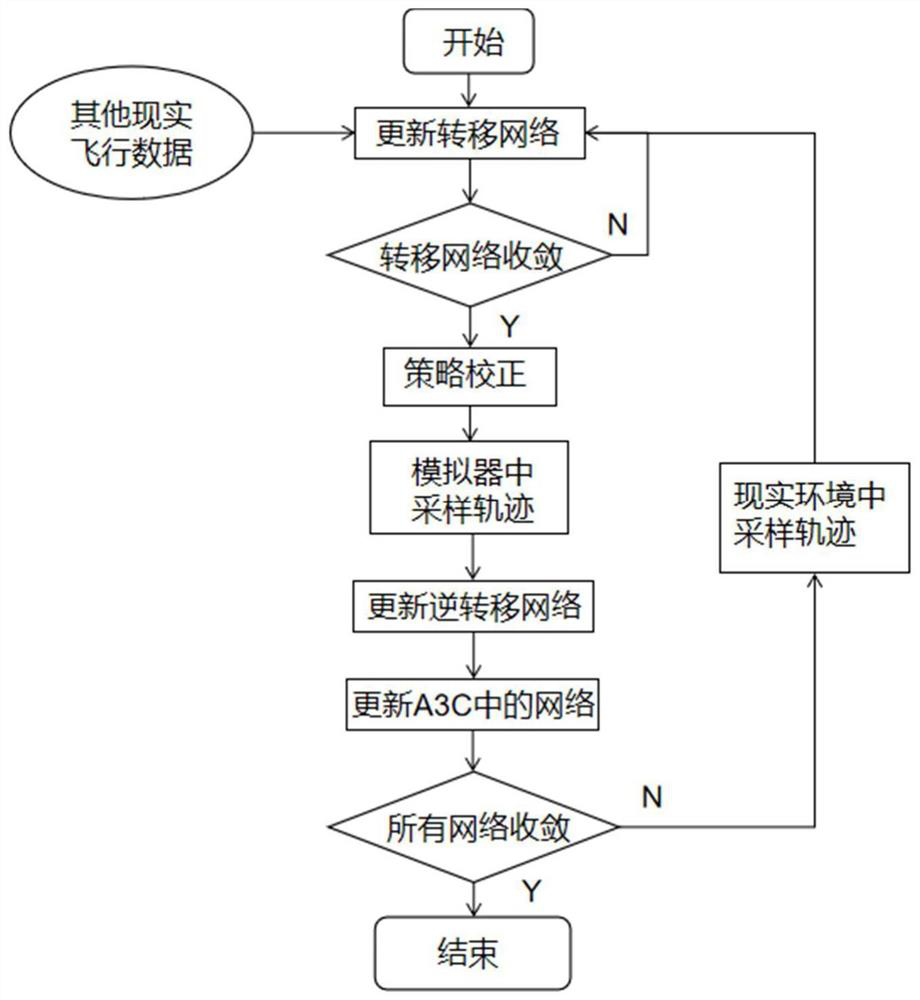
[0025] UAV autonomous flight training method based on reinforcement learning and transfer learning, collect flight data in the real environment, and learn the state transition model of the real environment; simultaneously train the UAV flight strategy and the inverse transfer model of the simulator environment in the simulator , and use the transfer model of the real environment and the inverse transfer model of the simulated environment to correct the flight maneuvers to be performed in the simula...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More