

A UAV precision spray control system and control method
A spray control and control system technology, applied in neural learning methods, mechanical equipment, aircraft parts, etc., can solve the problem of unmanned aerial vehicle operation real-time performance and stability, droplet size and distribution changes , unfavorable drone operating status and other issues, to achieve the effect of improving anti-interference ability, simple structure, accurate and efficient adjustment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
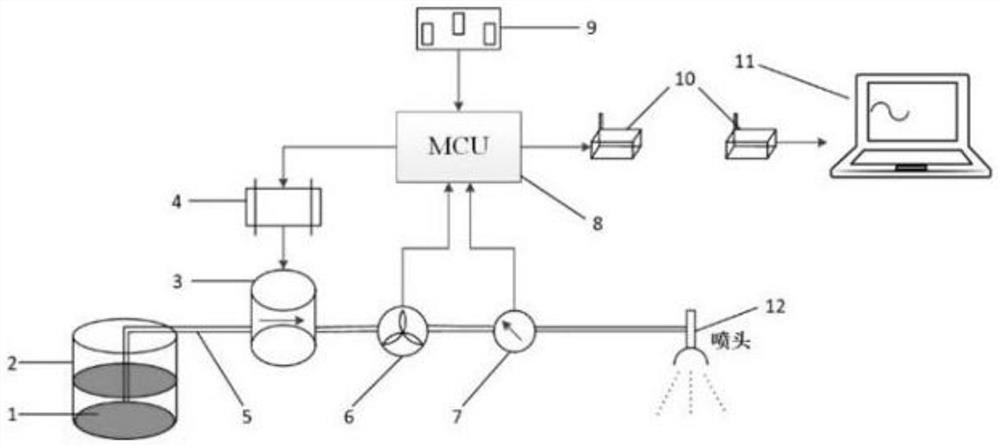
[0085] The input end of the PWM drive module 4 is connected to the processor 8 to receive the PWM control signal sent by the single-chip microcomputer.
[0090] The power supply module 9 is connected to each module through wires to provide power to the entire set of devices.
[0091] The wireless communication module 10, the wireless communication module 10 is divided into a receiving end and a transmitting end. The sending end is connected to the processor 8, and sends
[0092] The host computer 11 is connected to the wireless communication module 10 receiving end, and is responsible for receiving and analyzing the data sent by the spray device.
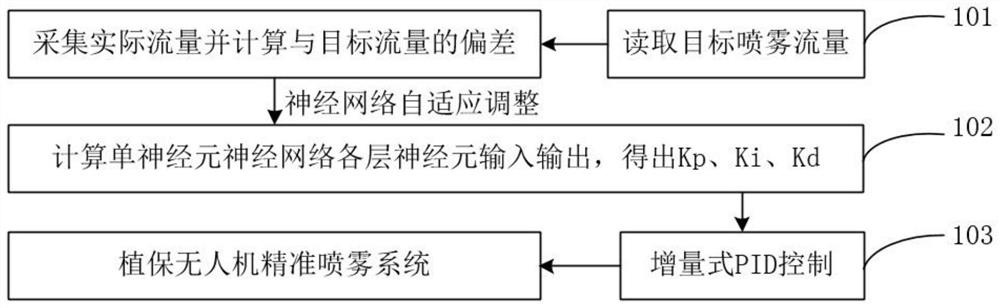
[0097] According to the single neuron neural network and the PID control algorithm, a single neuron PID control algorithm model is established.
[0100]
[0103]
[0105]
[0107]
[0122] P=0.2*U, in the formula, P is the voltage value (unit: MPa) measured by the pressure sensor, and U is the output voltage analog quantity
[0124] The...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More