

Method for analyzing jumping dynamic state of flexible micro magnetic control robot
A technology of micro-robots and analysis methods, applied in the direction of instruments, special data processing applications, complex mathematical operations, etc., can solve the problem that it is difficult to reach the predetermined destination, the theoretical model of the jumping dynamics of micro-magnetic-controlled robots is not satisfactory, and theoretical analysis general reliability issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0099] The following is a specific flexible micro-magnetized robot as an example to describe the complete method of its jumping dynamic analysis.
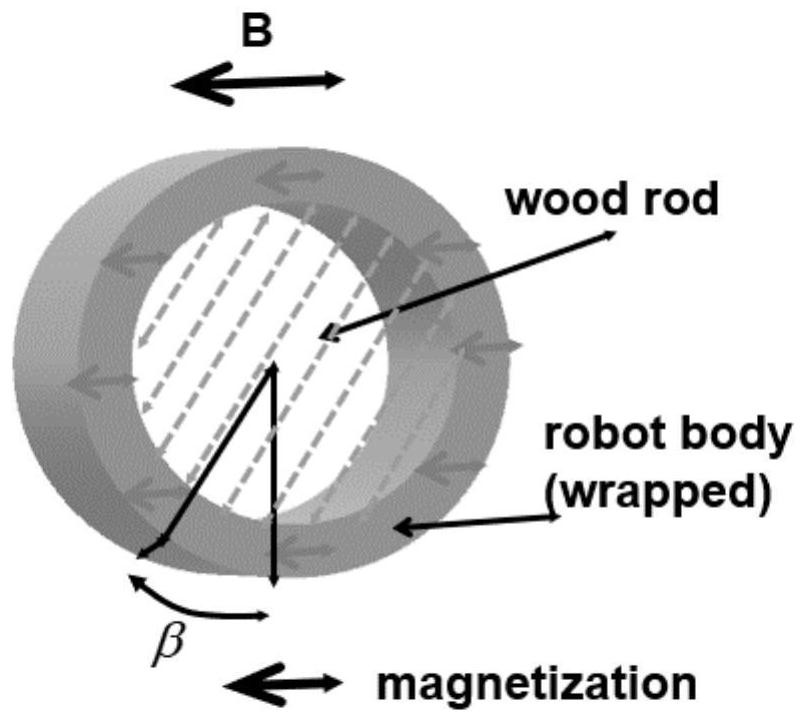
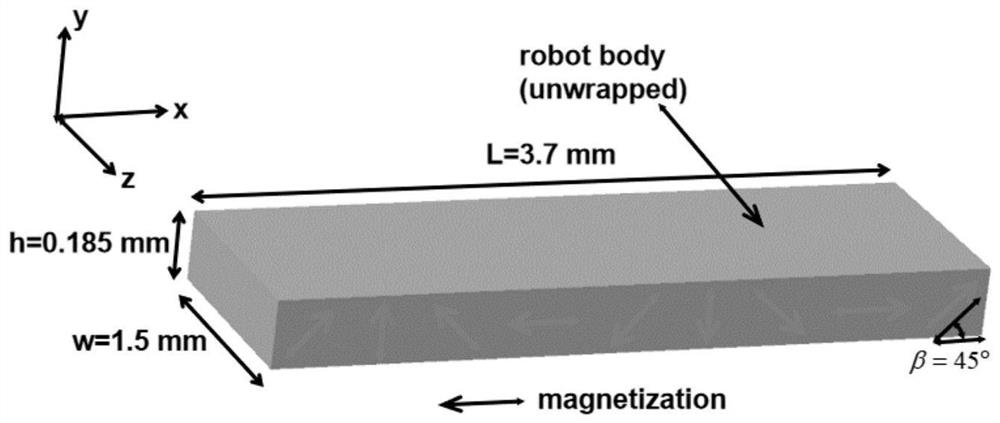
[0100] (1) Preparation of micro soft robots
[0101] The base material of the micro soft robot body is Ecoflex 00-10 polymer matrix (Smooth-On Inc.; density is 1.04g / cm3) loaded with NdFeB magnetic particles (MQP15-7, Magnequench; average The diameter is 5μm and the density is 7.61g / cm3). The Ecoflex 00-10 polymer matrix provides the basic strength and elasticity of the robot body, while the NdFeB particles give the robot the ability to respond to magnetic fields and achieve different modes of motion. The resulting magnetic robot has a density of 1.85 g / cm3.
[0102]During the fabrication process of the robot, the polymer matrix and NdFeB magnetic particles are cast onto flat glass to form a thin film, while being thoroughly stirred and mixed to obtain a homogeneous composition. The material was exposed to air at room temperatur...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Density | aaaaa | aaaaa |
| The average diameter | aaaaa | aaaaa |
| Density | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More