

Intelligent underwater robot with umbilical cable based on Beidou positioning
An underwater robot, Beidou positioning technology, applied in the direction of underwater ships, underwater operation equipment, satellite radio beacon positioning system, etc., can solve the problem of high cost of acoustic and magnetic communication, unstable underwater movement, limited working distance, etc. problems, to achieve the effect of reducing technology dependence, improving mobile security and stability, and reducing restrictions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of the present invention.
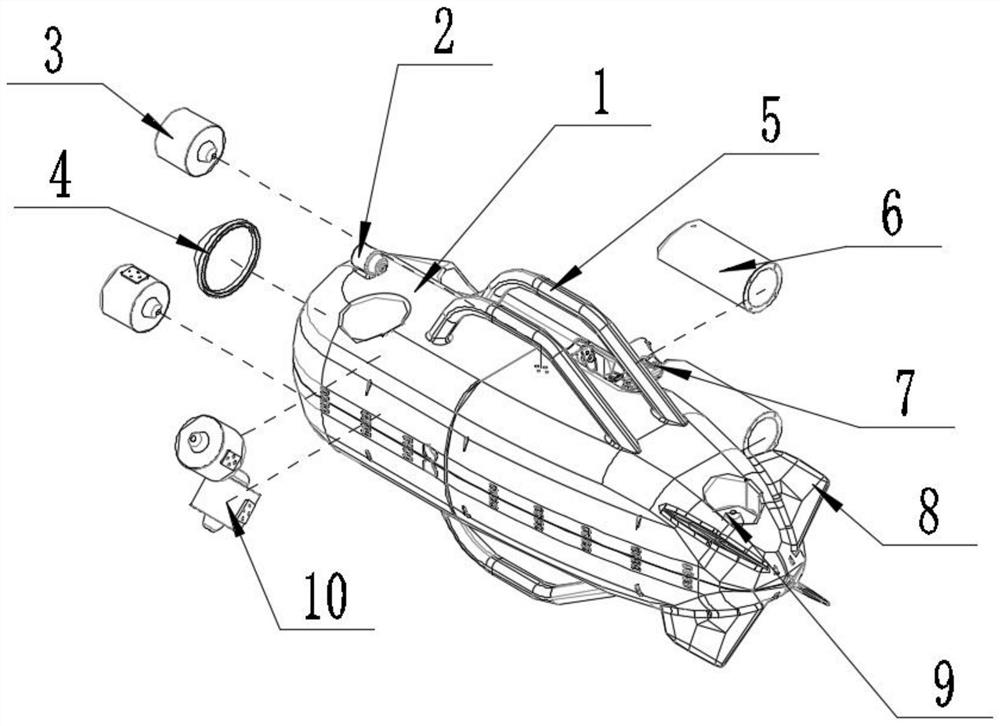
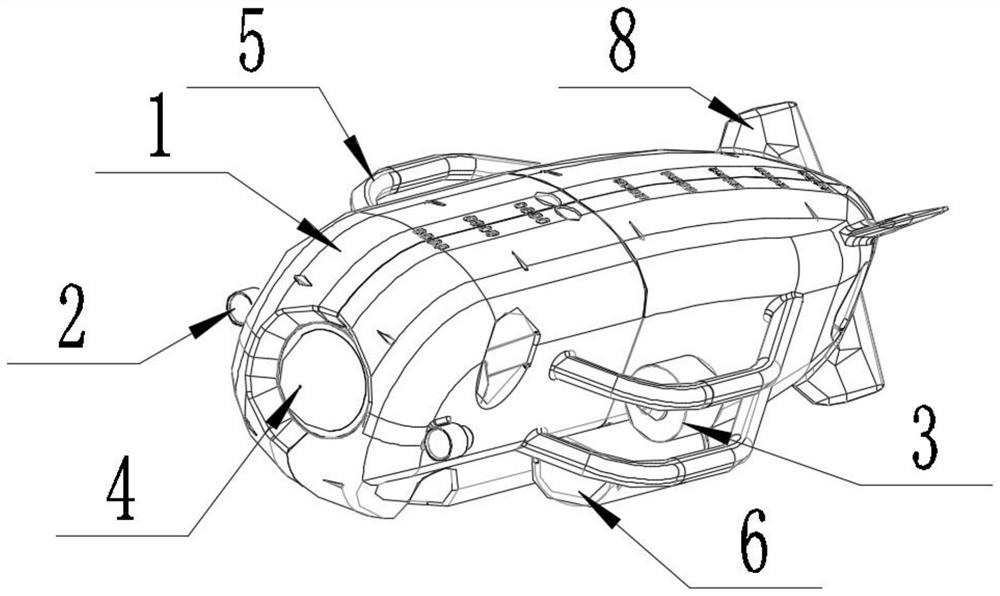
[0031] see Figure 1-6 , the present invention provides a technical solution: an intelligent underwater robot with an umbilical cable based on Beidou positioning, including a robot main body 1, longitudinal motors 3 are fixedly connected to both sides of the robot main body 1, and a rear part of the robot main body 1 A transverse motor 9 is fixedly installed on the side, and several tail fin modules 8 are fixedly connected to the four corners of the tail of the rob...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More