

Maximum sensor data acquisition path planning method and system based on unmanned aerial vehicle group
A technology for path planning and data collection, applied in control/regulation systems, instruments, vehicle position/route/altitude control, etc., and can solve problems such as low efficiency and overlapping coverage areas
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
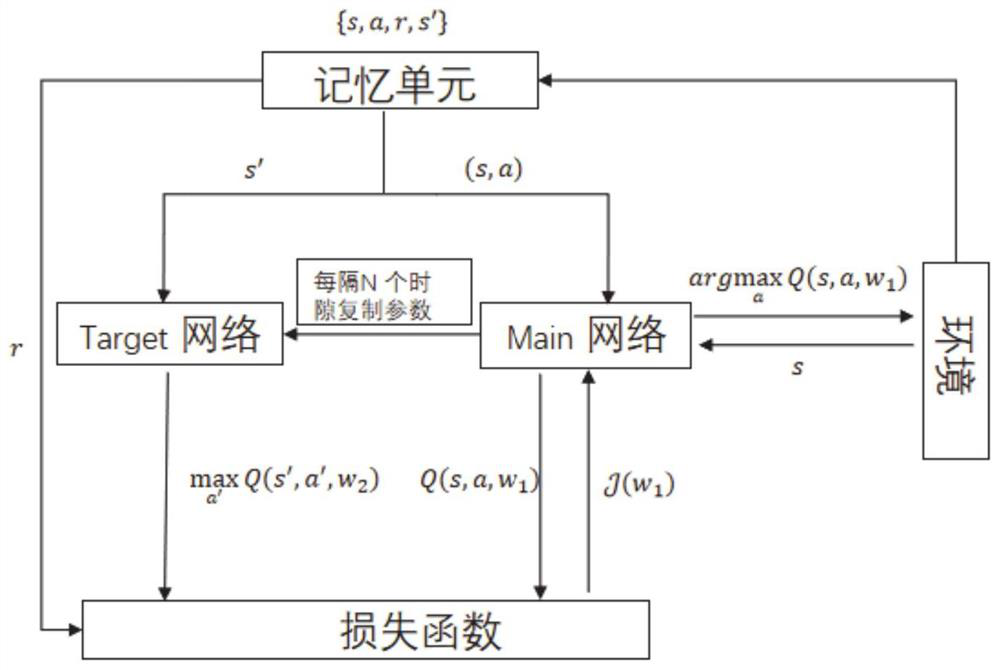
[0038] Such as image 3 As shown, Deep Q-Network (DQN) is one of the main algorithms in deep reinforcement learning. Its algorithm idea is based on the algorithm of value iteration, which uses a deep convolutional network to fit a function representing a state-action pair, so as to solve the problem of large state and action sets and continuous actions. It consists of two neural networks with the same structure but different parameters. One of the deep neural networks is used to evaluate the value function of the current state-action, and the other is used to predict the Q reality and train the network parameters through the loss function. During the training process, the agent collects training data through random sampling to break the correlation between data. Use experience replay techniques during training to improve convergence and stability performance. The general process of DQN is: the agent performs an action based on the current state input, and then obtains the c...
Embodiment 2
[0062] This embodiment provides a method for planning a maximum sensor data collection path based on a UAV swarm.
[0063] The maximum sensor data acquisition path planning method based on UAV swarms, including multiple sensors distributed in a given fixed area to collect surrounding ground environment information, UAV swarms that acquire information collected by sensors, and ground base stations that receive data sent by UAVs, Specifically include the following steps:
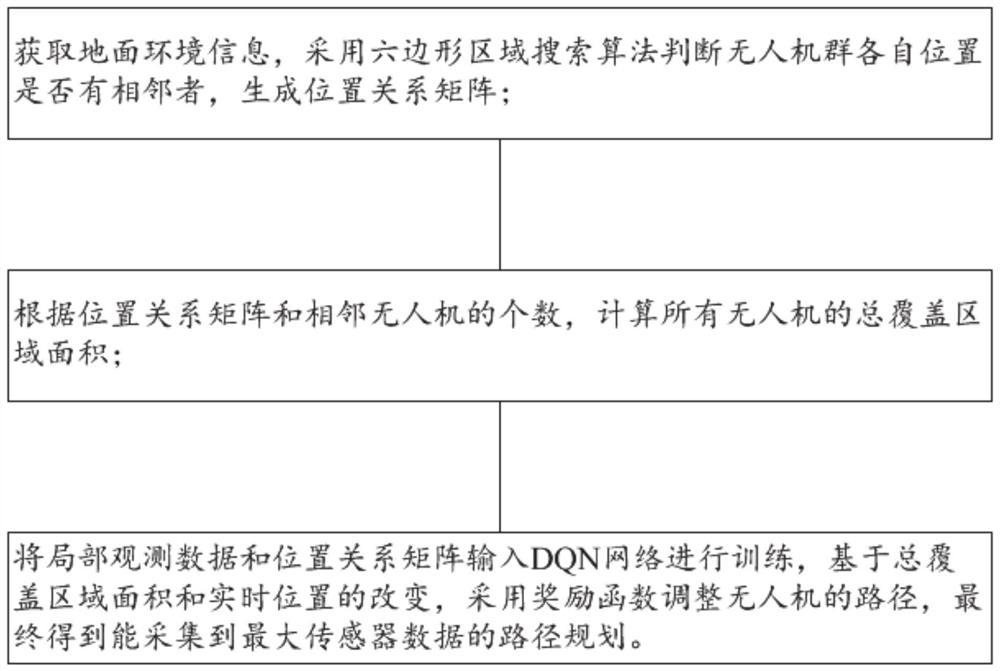
[0064] Obtain the ground environment information collected by the sensor, use the hexagonal area search algorithm to determine whether there are neighbors in each position of the drone group, and generate a position relationship matrix;
[0065] Calculate the total coverage area of all drones according to the position relationship matrix and the number of adjacent drones;
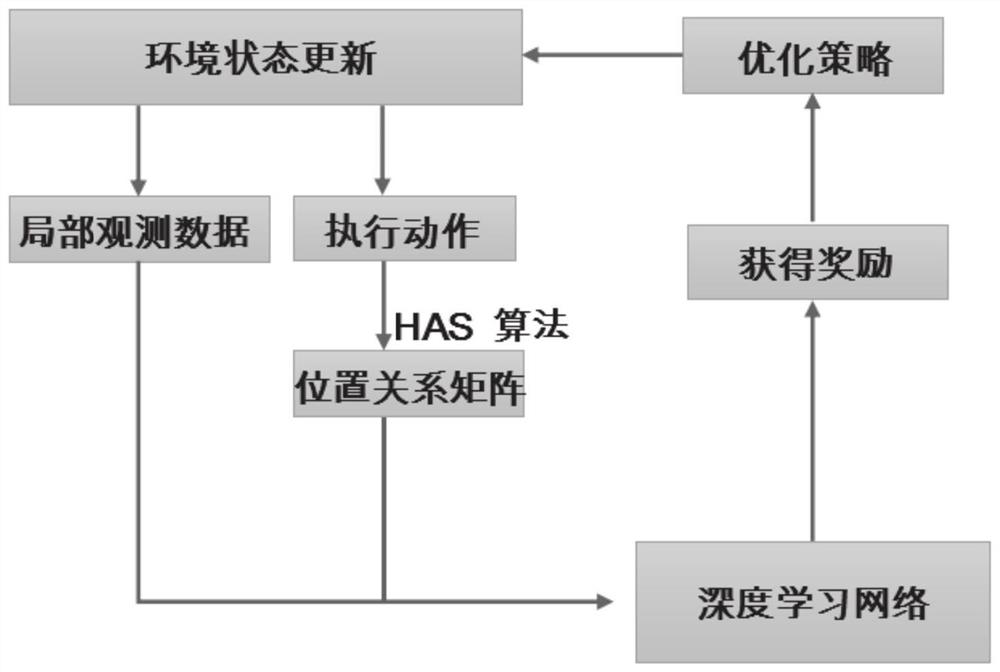
[0066] The ground base station obtains the local observation data and position relationship matrix, and inputs the local observation da...
Embodiment 3
[0111] This embodiment provides a path planning system for maximum sensor data collection based on UAV swarms.
[0112] The maximum sensor data acquisition path planning system based on UAV swarms, including:
[0113] The matrix generation module is configured to: obtain ground environment information, use a hexagonal area search algorithm to determine whether there are neighbors in the respective positions of the drone group, and generate a positional relationship matrix;
[0114] The total coverage area calculation module is configured to: calculate the total coverage area of all drones according to the position relationship matrix and the number of adjacent drones;
[0115] The path planning module is configured to: input the local observation data and position relationship matrix into the DQN network for training, adjust the path of the UAV based on the total coverage area and real-time position, and finally obtain the maximum Path planning for sensor data.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More